
Recomendados
Más contenido relacionado
Similar a Programa_Analitico_Asignatura_360960.pdf
Similar a Programa_Analitico_Asignatura_360960.pdf (20)
Último
Último (8)
Programa_Analitico_Asignatura_360960.pdf
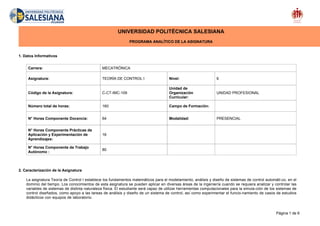
- 1. UNIVERSIDAD POLITÉCNICA SALESIANA PROGRAMA ANALÍTICO DE LA ASIGNATURA 1. Datos Informativos Carrera: Asignatura: Código de la Asignatura: Nivel: MECATRÓNICA TEORÍA DE CONTROL I C-CT-IMC-109 6 Número total de horas: N° Horas Componente Docencia: N° Horas Componente Prácticas de Aplicación y Experimentación de Aprendizajes: N° Horas Componente de Trabajo Autónomo : Unidad de Organización Curricular: Campo de Formación: Modalidad: 160 64 16 80 UNIDAD PROFESIONAL PRESENCIAL 2. Caracterización de la Asignatura La asignatura Teoría de Control I establece los fundamentos matemáticos para el modelamiento, análisis y diseño de sistemas de control automáti-co, en el dominio del tiempo. Los conocimientos de esta asignatura se pueden aplicar en diversas áreas de la ingeniería cuando se requiera analizar y controlar las variables de sistemas de distinta naturaleza física. El estudiante será capaz de utilizar herramientas computacionales para la simula-ción de los sistemas de control diseñados, como apoyo a las tareas de análisis y diseño de un sistema de control, así como experimentar el funcio-namiento de casos de estudios didácticos con equipos de laboratorio. Página 1 de 6
- 2. 3. Resultados de Aprendizaje • Analiza e interpreta el estado transitorio y el estado estable de un sistema en el dominio temporal mediante la función de transferencia. • Analiza e interpreta la estabilidad absoluta de un sistema dinámico. • Conoce los fundamentos de los sistemas de control en lazo abierto y lazo cerrado. • Diseña e implementa sistemas de control en espacios de estados. • Diseña e implementa sistemas de control retroalimentados utilizando PID. • Utiliza diversas técnicas de representación de los sistemas dinámicos. • Utiliza ecuaciones diferenciales para modelar un sistema dinámico. 4. Contenidos Unidades Temáticas Contenidos de la Unidad Resultados de Aprendizaje de la Asignatura correspondientes a cada Indicadores de Logro TOTAL DE HORAS POR UNIDAD UNIDAD 1 - Fundamentos de los sistemas de control. 20 Identifica los componentes, señales y parámetros de un sistema de control Conoce los conceptos asociados a sistemas de control en lazo abierto y lazo cerrado Conoce los fundamentos de los sistemas de control en lazo abierto y lazo cerrado. 1.1 Componentes de un sistema de control. 1.2 Sistemas de control en lazo abierto y lazo cerrado. Concepto de camino directo y camino de realimentación en un sistema de control en lazo cerrado. 1.3 Señales y parámetros en un sistema de control. 1.4 Introducción al análisis y diseño de un sistema de control. Régimen transitorio y régimen estacionario: Definición a partir de casos de estudio. 1.5 El proceso de diseño de un sistema de control UNIDAD 2 - Modelos matemáticos de sistemas lineales. 20 1.1 Obtiene el modelo de sistemas dinámicos utilizando ecuaciones diferenciales 1.2 Obtiene la Función de transferencia de sistemas Utiliza ecuaciones diferenciales para modelar un sistema dinámico. Utiliza diversas técnicas de representación de los sistemas 2.1 Modelado de sistemas dinámicos usando ecuaciones diferenciales ordinarias. 2.2 Comparación entre sistemas lineales vs. sistemas no lineales, sistemas invariantes vs. sistemas variantes en el tiempo. 2.3 Definición de la función de Página 2 de 6
- 3. dinámicos. 2.1 Representa sistemas dinámicos mediante diagramas de bloques y puede operarlos. 2.2 Obtiene el modelo de variables de fase en el espacio de estados de sistemas dinámicos dinámicos. transferencia. 2.4 Obtención de la función de transferencia a partir del modelo de ecuaciones diferenciales ordinarias 2.5 Diagramas de bloques y Algebra de bloques. 2.6 Representación de sistemas en el espacio de estados. Definición de Variables de estado y Variables de fase. 2.7 Obtención del modelo lineal por representación en el espacio de estados a partir del modelo de ecuaciones diferenciales ordinarias lineales. 2.8 Conversión del modelo lineal por representación en el espacio de estados a la función de transferencia. UNIDAD 3 - Análisis de sistemas en el dominio del tiempo y en el plano de la variable compleja 40 1.1 Determina los parámetros de comportamiento transitorio en sistemas de control 2.1 Determina el error en estado estable en sistemas de control 2.2 Determina la estabilidad absoluta en sistemas de control. Analiza e interpreta el estado transitorio y el estado estable de un sistema en el dominio temporal mediante la función de transferencia. Analiza e interpreta la estabilidad absoluta de un sistema dinámico. 3.1 Análisis de Sistemas de primer orden, respuesta analítica y especificaciones de respuesta transitoria. 3.2 Análisis de Sistemas de segundo orden, respuesta sobreamortiguada, subamortiguada, criticamente amortiaguada oscilatoria. 3.3 Parámetros de un sistema de segundo orden: frecuencia natural de oscilación y coeficiente de amortiguamiento 3.4 Especificaciones de respuesta transitoria de un sistema de segundo orden subamortiguado. 3.5 Análisis de Sistemas de Orden superior y Aproximación a Sistemas de Segundo Orden 3.6 Análisis de sistemas en estado estable, señales de prueba y constantes de error. 3.7 Estabilidad de sistemas de control. Criterio de Hurwitz para estabilidad absoluta. UNIDAD 4 - Diseño de controladores en el dominio del tiempo. 50 Diseña e implementa controladores del tipo proporcional, proporcional- derivativo, proporcional-integral y proporcional-integral-derivativo utilizando Diseña e implementa sistemas de control retroalimentados utilizando PID. 4.1 La Función de Transferencia como una Función de variable compleja. Magnitud y fase de una función de variable compleja. 4.2 Control proporcional. 4.2.1 Diseño usando en Lugar de Las Raíces. 4.3 Control proporcional-derivativo. Página 3 de 6
- 4. el Lugar Geométrico de las Raíces 4.3.1 Función de transferencia. 4.3.2 Efecto del control derivativo en la respuesta transitoria, incorporación de un cero en el camino directo del sistema de control. 4.3.3 Diseño usando en Lugar de Las Raíces. 4.4 Control proporcional-integral. 4.4.1 Función de transferencia. 4.4.2 Efecto del control integral en la respuesta estacionaria, interpretación a través de la incorporación de un polo en el origen en el camino directa del sistema de control. 4.4.3 Diseño usando en Lugar de Las Raíces. 4.5 Control proporcional-integral-derivativo. 4.5.1 Función de transferencia. 4.5.2 Efecto en la respuesta transitoria y la respuesta estacionaria. 4.5.3 Diseño usando en Lugar de Las Raíces. UNIDAD 5 - Diseño de sistemas de control en espacio de estados. 30 Determina la controlabilidad y observabilidad a partir de un modelo representado en el espacio de estados. Diseña e implementa controladores en el espacio de estados utilizando el método de asignación de polos. Diseña e implementa observadores de orden completo en el espacio de estados utilizando el método de asignación de polos. Diseña e implementa sistemas de control en espacios de estados. 5.1 Controlabilidad de estado y Criterio de controlabilidad de Kalman 5.2 Diseño de un controlador por realimentación de estado basado en el problema de relocalización de polos en el espacio de estado. 5.3 Cálculo de las ganancias de realimentación por el método de asignación de polos. 5.4 Eliminación del error en estado estable. Diseño de las ganancias de realimentación incluyendo la ganancia integral. 5.5 Observabilidad de estado y Criterio de observabilidad de Kalman 5.6 Diseño de observadores de orden completo, integración con el sistema de control. Página 4 de 6
- 5. 5. Metodologías de Aprendizaje - Aprendizaje colaborativo, estrategia para incentivar el diálogo y discusión entre los estudiantes y con el docente, donde todos los miembros colaboran en la construcción del conocimiento y contribuyen al aprendizaje de todo. - Aprendizaje basado en problemas, mediante esta metodología, los estudiantes deben encontrar una solución a un problema planteado, de este modo consiguen elaborar un diagnóstico de las necesidades de aprendizaje, construir el conocimiento y trabajar cooperativamente - Metodología “aula invertida”, es una metodología de aprendizaje semipresencial, donde los estudiantes aprenden los conceptos desde casa viendo videos en línea y los ejercicios que anteriormente fueron realizados en clase - El Aprendizaje basado en investigación, considera al estudiante como protagonista de su propio aprendizaje? Los estudiantes actúan como investigadores, aprenden y desarrollan habilidades de investigación mediante la experimentación. La enseñanza se orienta a ayudar a los estudiantes a comprender los fenómenos de la forma en que lo hacen los expertos. - Aprendizaje basado en proyectos - Prácticas de laboratorio: propende a que los estudiantes adquieran las habilidades propias de los métodos de la investigación científica, amplíen, profundicen, consoliden, realicen y comprueben los fundamentos de la asignatura mediante experimentación 6. Procedimiento de Evaluación Según el Reglamento Interno de Régimen Académico: Artículo 41.- Evaluación de aprendizajes. - Para la aprobación de asignaturas en los niveles de grado, independientemente de la modalidad de estudios, el estudiante debe demostrar dominio de conocimientos, capacidades, destrezas y desempeños previstos en los resultados de aprendizaje. La evaluación se realiza en forma sistemática y continua sobre un total de cien puntos divididos en dos partes de cincuenta puntos cada una, que incluyen aprovechamiento y examen. La nota mínima para la aprobación es de setenta puntos. Artículo 42.- El aprovechamiento será evaluado y calificado con un mínimo de treinta puntos, considerando los resultados de aprendizaje previstos en la planificación micro curricular y las actividades de aprendizaje desarrolladas. La calificación de aprovechamiento será el resultado de por lo menos tres actividades de aprendizaje, sean éstas de carácter colaborativo, prácticas de aplicación y experimentación, trabajo autónomo, u otras: De carácter colaborativo: a Sistematización de prácticas de investigación-intervención, b Proyectos de integración de saberes, c Construcción de modelos y prototipos, d Proyectos de problematización, e Resolución de problemas o casos. De prácticas de aplicación y experimentación: a Prácticas de campo, b Trabajos de observación dirigida, c Resolución de problemas, d Talleres. De trabajo autónomo: a Elaboración individual de ensayos, b Trabajos y exposiciones, c Pruebas orales o escritas, d Resolución de guías didácticas, Página 5 de 6
- 6. e Indagación bibliográfica. Otras TEXTOS BÁSICOS AUTOR; TÍTULO; EDICIÓN Y AÑO 1 Norman S. Nise., Control systems engineering ,7a. Edition, John Wiley & Sons, 2015 2 Richard C. Dorf, Robert H. Bishop, Modern Control Systems, 13th. edición, Pearson Educación, 2017 3 Ogata, Katsuhiko, Ingeniería de control moderna, 5ta. Edición; Madrid: Pearson, 2010 7. Bibliografía LECTURAS SUGERIDAS 1 Carlos A. Smith, Armando B. Corripio; Control automático de procesos : teoría y práctica; 2a. edición; México, D. F. : Limusa Wiley, 2014. 2 Ogata, Katsuhiko, System Dynamics. 4th Ed., 6a reprint 2018. Uttar Pardesh, India : Pearson Education, 2013 Página 6 de 6