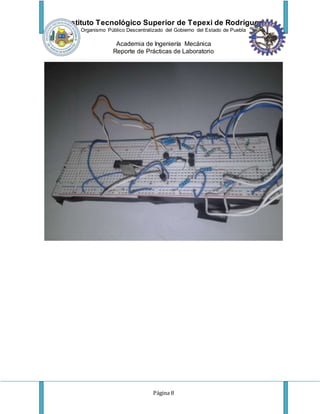
El documento describe un reporte de práctica sobre un carro seguidor de líneas. El objetivo era comprender el funcionamiento de los sensores y OPAMPs utilizados en el circuito del carro. Se realizó la parte teórica y práctica, construyendo el circuito en un protoboard. Los resultados mostraron que los sensores pueden sustituir decisiones humanas al seguir líneas de manera autónoma.




































![Reporte 3 daniel[1]](https://cdn.slidesharecdn.com/ss_thumbnails/reporte3daniel1-160729065949-thumbnail.jpg?width=640&height=640&fit=bounds)
















