Descargado 118 veces

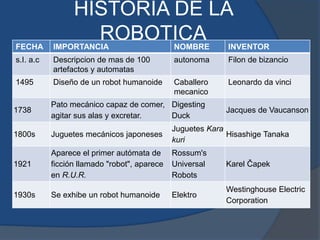
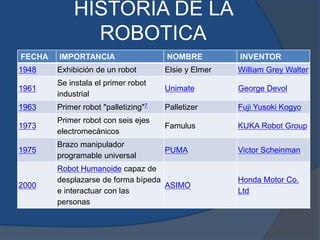





Este documento trata sobre la historia y clasificación de los robots. Resume las principales disciplinas de la robótica como la mecánica, electrónica, informática e inteligencia artificial. Además, describe hitos importantes en el desarrollo de robots a través de la historia y cómo pueden clasificarse según su cronología o arquitectura.













































