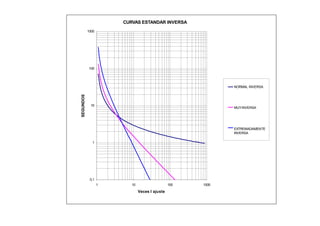
Este documento presenta los fundamentos de los sistemas de protecciones eléctricas. Explica la necesidad de tales sistemas para detectar condiciones anormales y restaurar la operación normal. También describe las características clave de los sistemas de protección como confiabilidad, selectividad, rapidez, exactitud y sensibilidad. Finalmente, cubre los conceptos de zonas de protección y protección principal y de respaldo.



































![1000.0 10000.
[pri.A]
1.0000
10.000
[s]
0.100
110.00 kV100.00
Rele 1 Rele 2
Rele 3
I=700.000
pri.A
0.828 s
I=1000.000
pri.A
0.428 s
0.642 s
0.552 s
1.379 s
1.070 s
I=2000.000
pri.A
0.297 s
0.446 s
0.743 s
DIgSILENT
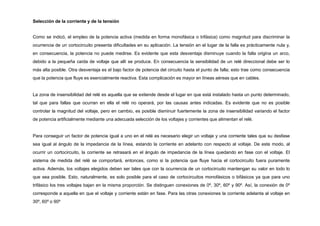
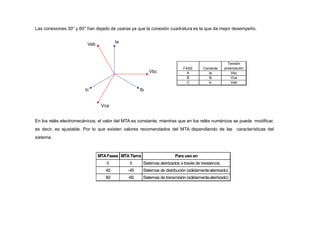
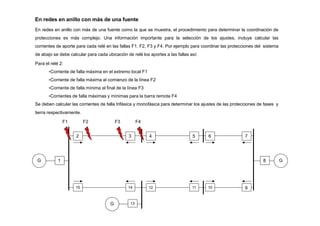
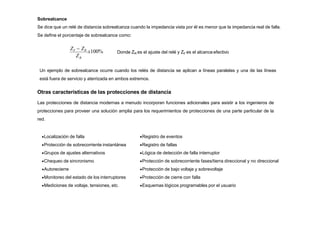
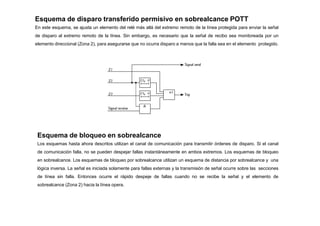
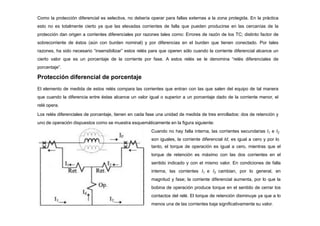
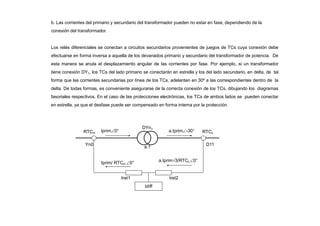
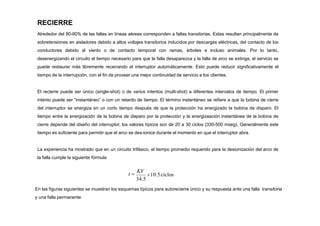
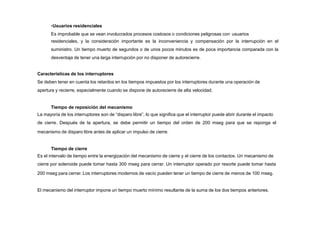
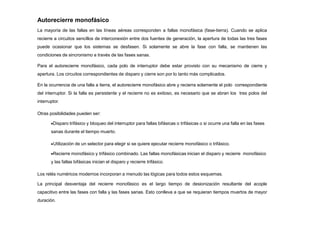
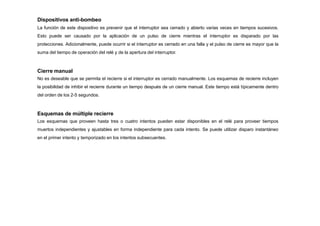
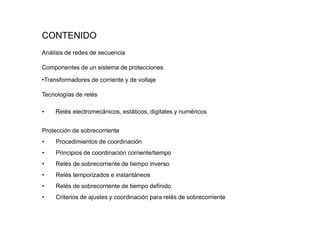
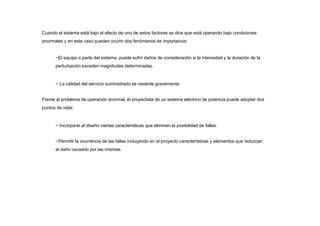
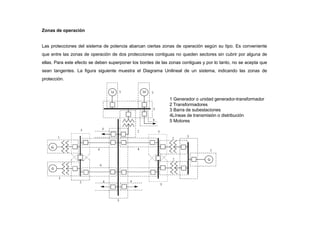
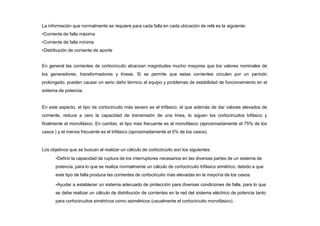
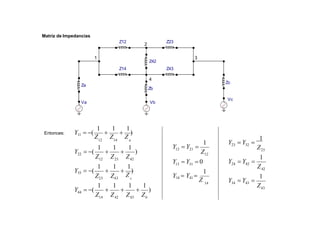
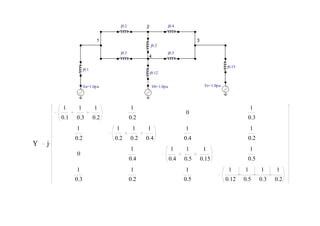
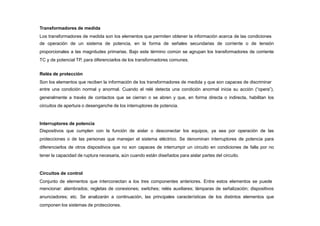
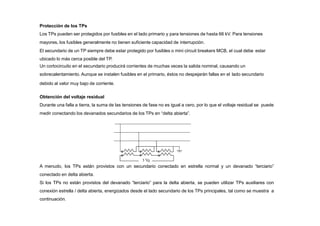
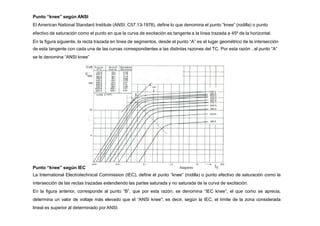
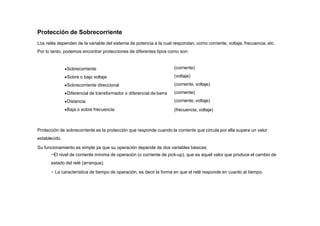
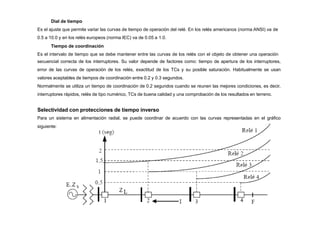
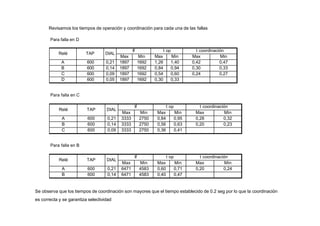
Con estas curvas de coordinación y para el sistema anterior:
Cuando ocurre una falla en 3 (700 Amperios), el relé 3 opera en 0.552 seg, el relé 2 opera en 0.828 seg y el relé 1 opera
en 1.379 seg.
Cuando ocurre una falla en 2 (1000 Amperios), el relé 2 opera en 0.642 seg y el relé 1 opera en 1.070 seg.
Cuando ocurre una falla en 1 (2000 Amperios), el relé 1 opera en 0.743 seg](https://image.slidesharecdn.com/cursoproteccioneshg-240223224416-5005ec99/85/TEORIA-BASICA-DE-PROTECCIONES-GENERALES-91-320.jpg)
![1000.0 10000.
[pri.A]
0.100
1.0000
10.000
[s]
0.010
110.00 kV100.00
Rele 1 Rele 2
Rele 3
I=700.000
pri.A
0.828 s
I=1000.000
pri.A
0.050 s
0.050 s 0.050 s
1.379 s
1.070 s
I=2000.000
pri.A
0.050 s
0.050 s
0.050 s
DIgSILENT
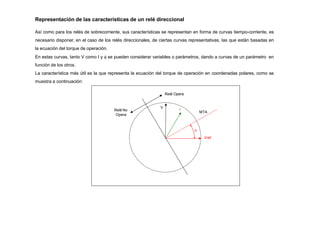
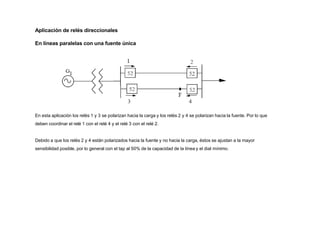
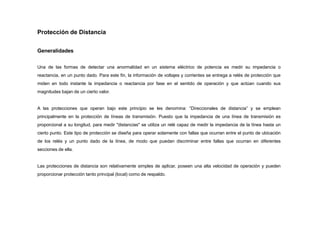
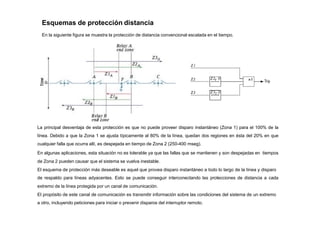
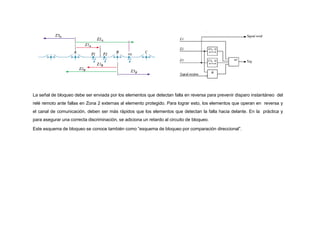
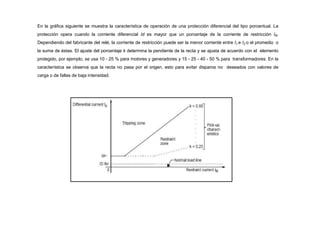
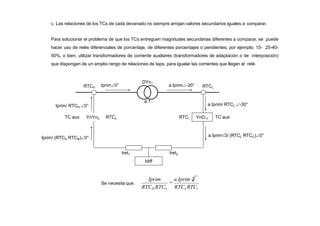
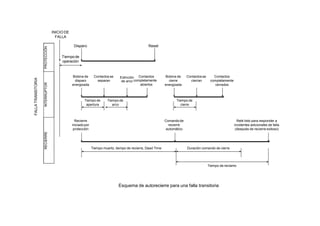
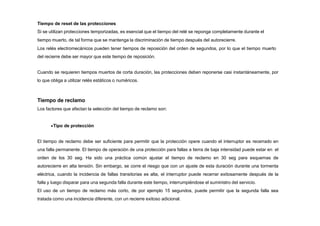
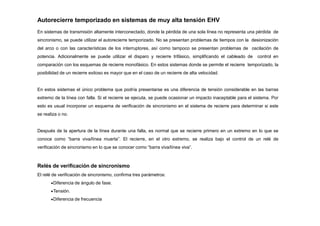
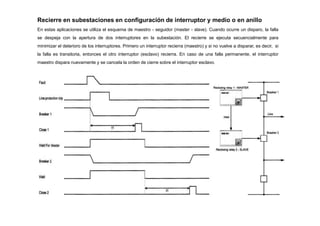
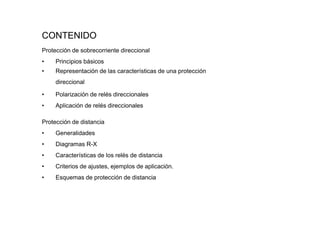
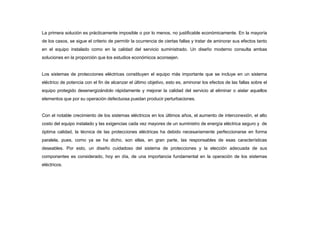
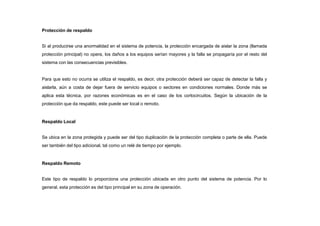
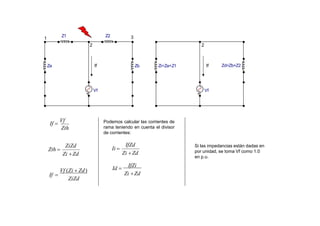
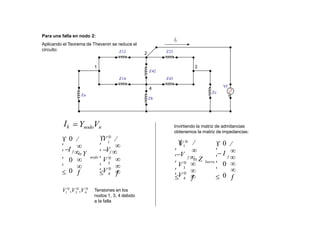
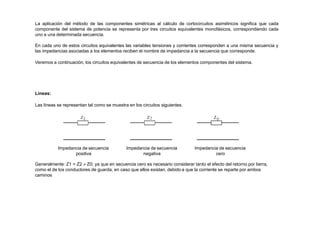
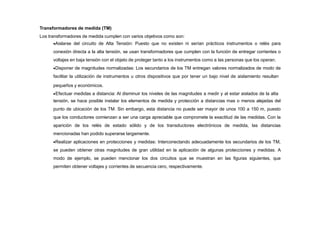
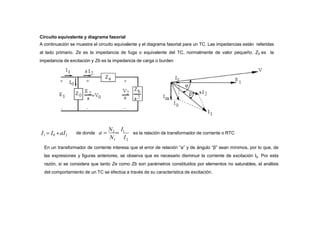
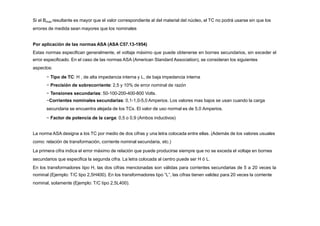
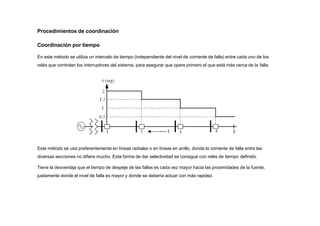
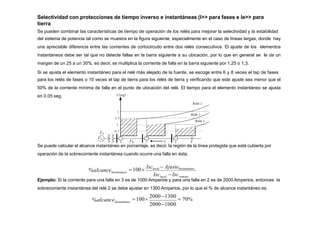
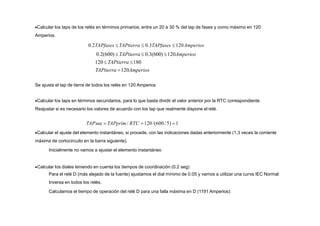
Con estas curvas de coordinación:
Cuando ocurre una falla en 3 (700 Amperios), el relé 3 opera en 0.05 seg, el relé 2 opera en 0.828 seg y el relé 1 opera
en 1.379 seg.
Cuando ocurre una falla en 2 (1000 Amperios), el relé 2 opera en 0.05 seg y el relé 1 opera en 1.070 seg.
Cuando ocurre una falla en 1 (2000 Amperios), el relé 1 opera en 0.05 seg](https://image.slidesharecdn.com/cursoproteccioneshg-240223224416-5005ec99/85/TEORIA-BASICA-DE-PROTECCIONES-GENERALES-93-320.jpg)







![1000.0 10000. 100000.
[pri.A]
0.100
1.000
10.000
100.00
[s]
0.010
110.00 kV100.00
Rele A Rele B
Rele C Rele D
I=3333.000
pri.A
0.201 s
0.361 s
0.562 s
0.843 s
I=6471.000
pri.A
0.144 s
0.259 s
0.402 s
0.604 s
I=15714.000
pri.A
0.104 s
0.187 s
0.290 s
0.436 s
I=1897.000
pri.A
0.301 s
0.541 s
0.842 s
1.262 s
DIgSILENT
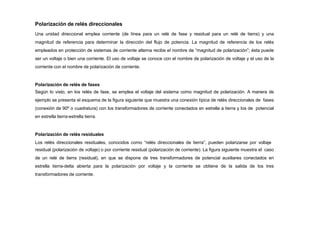
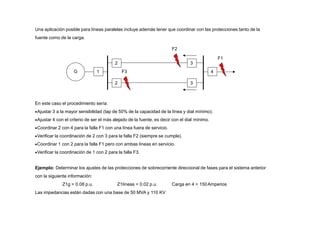
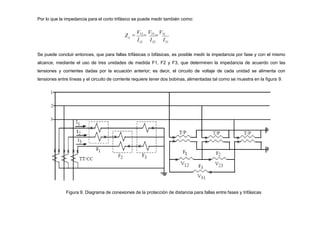
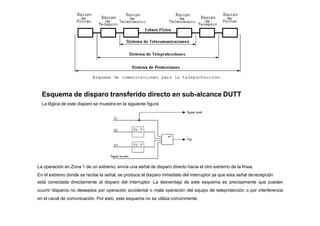
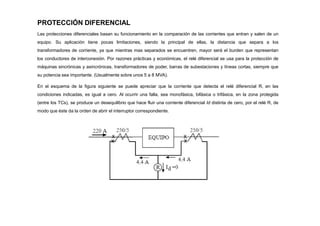
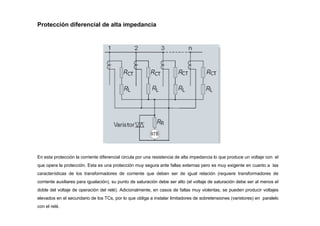
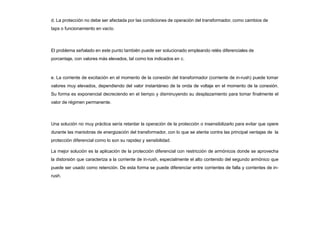
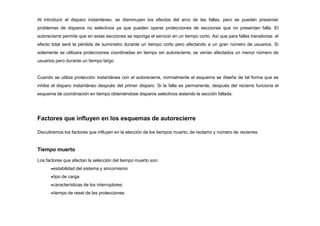
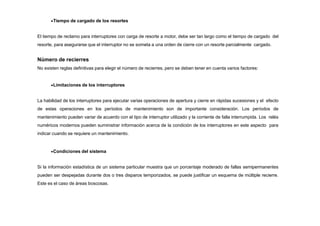
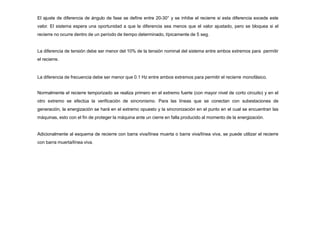
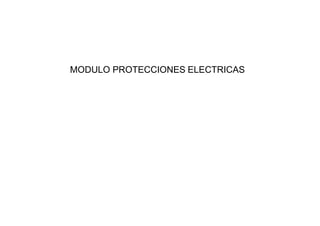
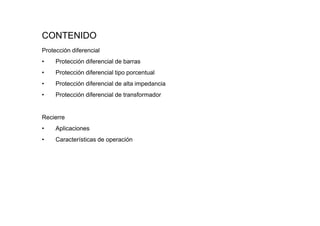
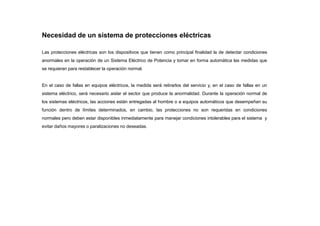
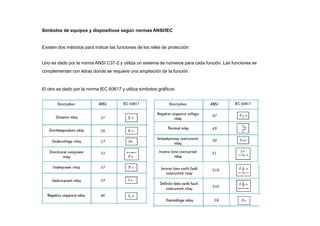
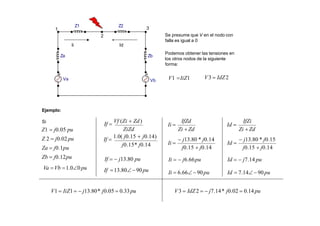
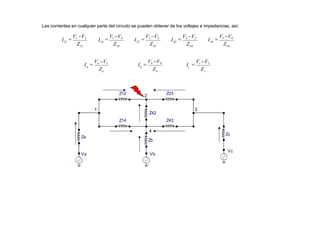
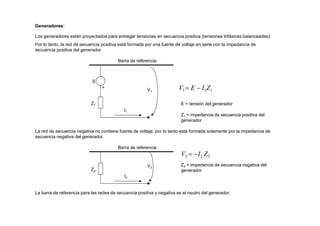
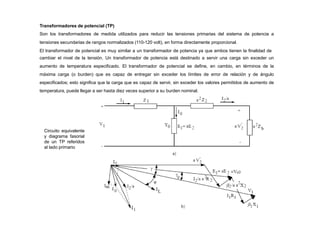
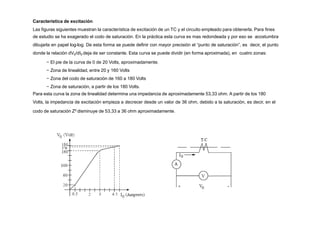
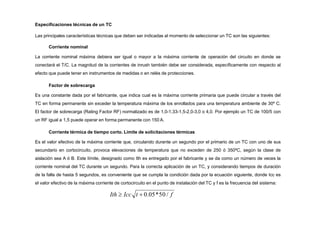
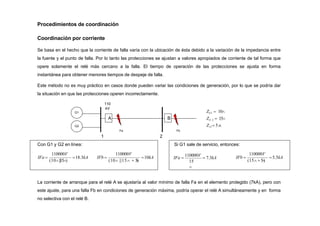
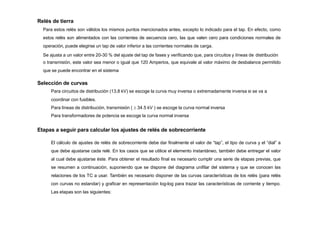
Curvas de coordinación para los relés de fases](https://image.slidesharecdn.com/cursoproteccioneshg-240223224416-5005ec99/85/TEORIA-BASICA-DE-PROTECCIONES-GENERALES-104-320.jpg)




![1000.0 10000. 100000.
[pri.A]
0.100
1.000
10.000
100.00
[s]
0.010
110.00 kV100.00
Rele A ReleB
Rele C ReleD
I=2171.000
pri.A
0.117 s
0.282 s
0.728s
0.493s
I=4583.000
pri.A
0.093 s
0.222 s
0.389 s
0.574 s
I=15000.000
pri.A
0.069 s
0.166 s
0.428s
0.290s
I=1191.000
pri.A
0.149 s
0.358 s
0.924s
0.626s
DIgSILENT
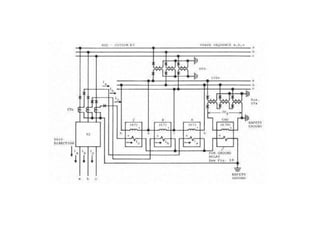
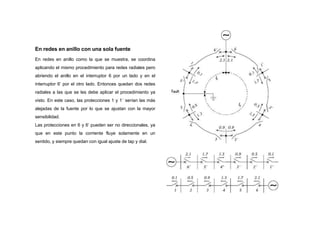
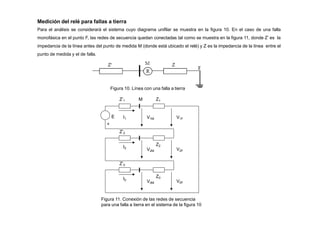
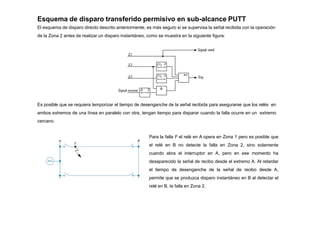
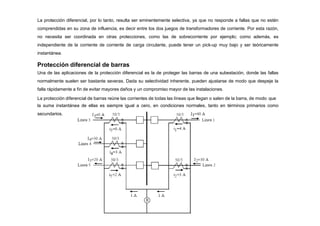
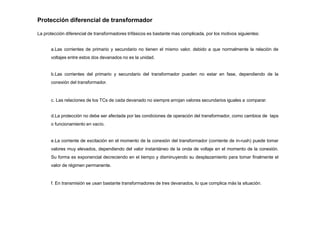
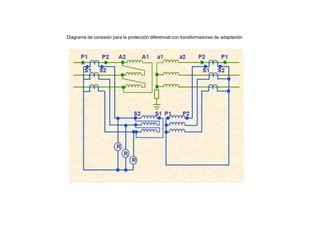
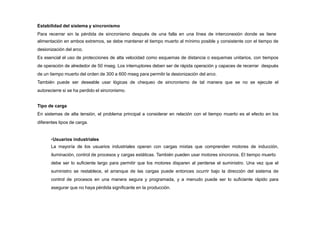
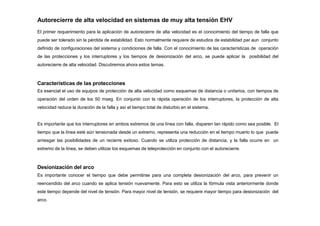
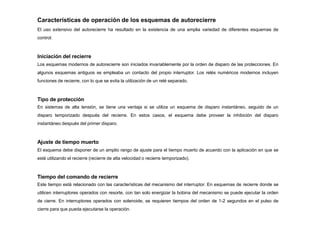
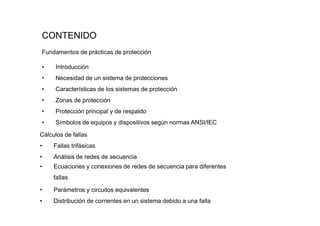
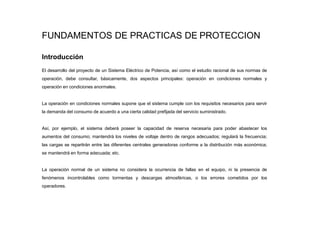
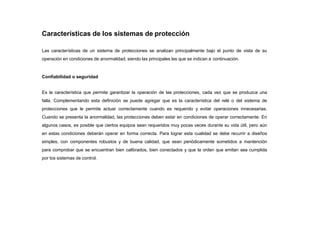
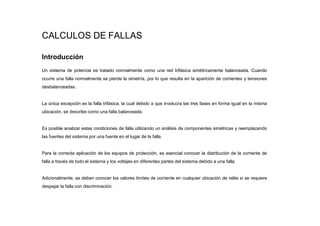
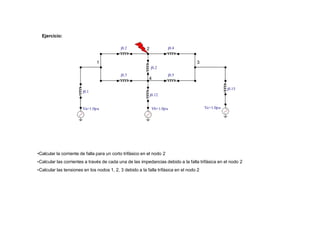
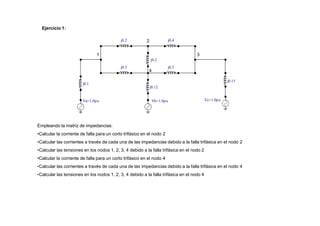
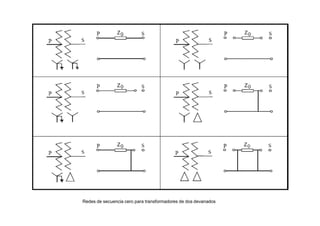
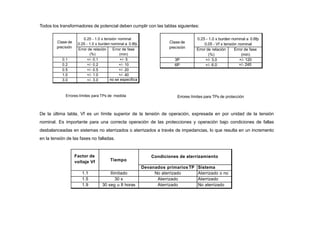
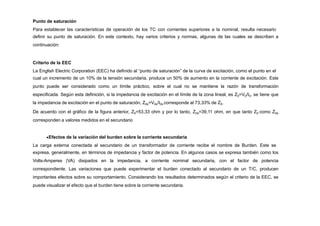
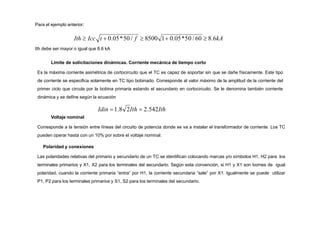
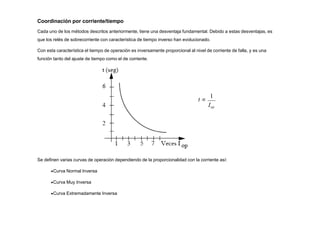
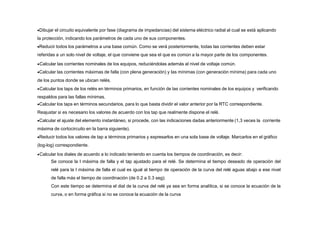
Curvas de coordinación para los relés de tierra](https://image.slidesharecdn.com/cursoproteccioneshg-240223224416-5005ec99/85/TEORIA-BASICA-DE-PROTECCIONES-GENERALES-110-320.jpg)