
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (18)
Destacado
Destacado (11)
Similar a Maquinas de Estado Finito
Similar a Maquinas de Estado Finito (20)
Último
Último (20)
Maquinas de Estado Finito
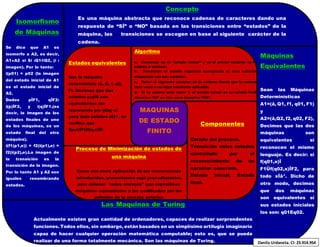
- 1. MAQUINAS DE ESTADO FINITO Concepto Es una máquina abstracta que reconoce cadenas de caracteres dando una respuesta de “SÍ” o “NO” basada en las transiciones entre “estados” de la máquina, las transiciones se escogen en base al siguiente carácter de la cadena. Algoritmo a. Comenzar en el “estado inicial” y en el primer carácter de la cadena a analizar. b. Transición al estado siguiente escogiendo el arco saliente etiquetado con ese carácter. c. Pasar al siguiente carácter de la cadena; Hasta que la cadena esté vacía o no haya transición aplicable. d. Si la cadena está vacía Y el estado actual es un estado final devuelve “SI” en otro caso devuelve “NO”. Máquinas Equivalentes Sean las Máquinas Determinísticas A1=(å, Q1, f1, q01, F1) y A2=(å,Q2, f2, q02, F2), Decimos que las dos máquinas son equivalentes si reconocen el mismo lenguaje. Es decir: si f(q01,x)Î F1Ûf(q02,x)ÎF2, para todo xÎå*. Dicho de otro modo, decimos que dos máquinas son equivalentes si sus estados iniciales los son: q01Eq02. Componentes Estado del proceso. Transición entre estados controlada por el reconocimiento de un carácter concreto. Estado inicial. Estado final. Las Maquinas de Turing Actualmente existen gran cantidad de ordenadores, capaces de realizar sorprendentes funciones. Todos ellos, sin embargo, están basados en un simplísimo artilugio imaginario capaz de hacer cualquier operación matemática computable; esto es, que se pueda realizar de una forma totalmente mecánica. Son las máquinas de Turing. Proceso de Minimización de estados de una máquina Como una mera aplicación de las conversiones introducidas, presentamos aquí procedimientos para obtener ``redes mínimas'' que especifican máquinas equivalentes a las codificadas por los métodos de la sección anterior. Isomorfismo de Máquinas Se dice que A1 es isomorfo a A2, es decir, A1»A2 si $i :Q1®Q2, (i : imagen). Por lo tanto: i(p01) = p02 (la imagen del estado inicial de A1 es el estado inicial de A2. Dados pÎF1, qÎF2: i(p)ÎF2, y i(q)ÎF1.(es decir, la imagen de los estados finales de uno de los máquinas, es un estado final del otro máquina). i(f1(p1,e)) = f2(i(p1),e) = f2(i(p2),e).La imagen de la transición es la transición de la imagen. Por lo tanto A1 y A2 son iguales renombrando estados. Estados equivalentes Sea la máquina determinista (å, Q, f, q0, F). Decimos que dos estados p,qÎQ son equivalentes (se representa por pEq) si para toda palabra xÎå*, se verifica que f(p,x)ÎFÛf(q,x)ÎF. Danilo Urdaneta. CI: 23.914.954