Informe sistemas empotrados
•Descargar como DOCX, PDF•
2 recomendaciones•2,114 vistas

Este documento describe los sistemas empotrados y en tiempo real. Un sistema empotrado es un sistema de computación diseñado para realizar funciones de control, procesamiento y/o monitorización de forma dedicada en tiempo real. Los sistemas empotrados tienen requerimientos de tiempo real y suelen incluir un microprocesador, software, memoria, entradas/salidas y estar diseñados para tareas específicas. Los componentes, arquitectura y comunicaciones de los sistemas empotrados varían dependiendo de la aplicación.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Similar a Informe sistemas empotrados
Similar a Informe sistemas empotrados (20)
Informe sistemas empotrados
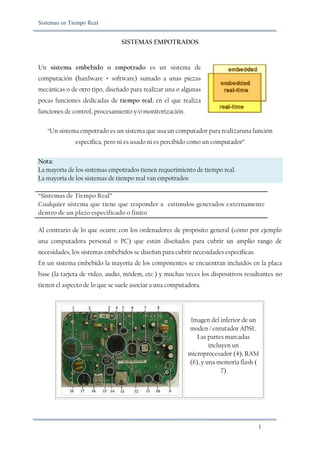
- 1. Sistemas en Tiempo Real SISTEMAS EMPOTRADOS Un sistema embebido o empotrado es un sistema de computación (hardware + software) sumado a unas piezas mecánicas o de otro tipo, diseñado para realizar una o algunas pocas funciones dedicadas de tiempo real, en el que realiza funciones de control, procesamiento y/o monitorización. “Un sistema empotrado es un sistema que usa un computador para realizaruna función específica, pero ni es usado ni es percibido como un computador” Nota: La mayoría de los sistemas empotrados tienen requerimiento de tiempo real. La mayoría de los sistemas de tiempo real van empotrados “Sistemas de Tiempo Real” Cualquier sistema que tiene que responder a estímulos generados externamente dentro de un plazo especificado o finito Al contrario de lo que ocurre con los ordenadores de propósito general (como por ejemplo una computadora personal o PC) que están diseñados para cubrir un amplio rango de necesidades, los sistemas embebidos se diseñan para cubrir necesidades específicas. En un sistema embebido la mayoría de los componentes se encuentran incluidos en la placa base (la tarjeta de vídeo, audio, módem, etc.) y muchas veces los dispositivos resultantes no tienen el aspecto de lo que se suele asociar a una computadora. Imagen del inferior de un moden / enrutador ADSL. Las partes marcadas incluyen un microprocesador (4), RAM (6), y una memoria flash ( 7) 1
- 2. Sistemas en Tiempo Real Algo de historia El primer sistema embebido reconocido fue el sistema de guía de Apolo desarrollado por el laboratorio de desarrollo del MIT para las misiones Apolo hacia la luna. Cadavuelo hacia la luna tenía dos de estos sistemas. La función era manejar el sistema deguía inercial de los módulos de excursión lunar. En un comienzo fue considerado comoel elemento que más riesgo presentaba en el proyecto Apolo. Este sistema de cómputofue el primero en utilizar circuitos integrados y utilizaba una memoria RAM magnética,con un tamaño de palabra de 16 bits. El software fue escrito en el lenguaje ensambladorpropio y constituía en el sistema operativo básico, pero capaz de soportar hasta ochotareas simultáneas. El primer sistema embebido producido en masa, fue el computador guía del misil norteamericano Minuteman II en 1962. El principal aspecto de diseño del computadordel Minuteman, es que además de estar construido con circuitos integrados, permitíareprogramar los algoritmos de guía del misil para la reducción de errores, y permitíarealizar pruebas sobre el misil ahorrando así el peso de los cables y conectores. 2
- 3. Sistemas en Tiempo Real Cuando los sistemas empotrados entraron en el rango de disciplina académica, se vio que uno de los grandes problemas radica en el particionado hardware/software; y para dar solución a este problema era necesaria la creación de modelos y algoritmos. Al principio de la década de los 90, se presentaron dos sistemas para dar solución a este problema, denominados VULCAN y COSYMA, los cuales tomaron aproximaciones complementarias para realizar este particionado, es decir, para decidir qué funciones serían realizadas vía software, y cuáles vía hardware. Mientras que VUCLAN colocaba todas las funciones en los dispositivos hardware, e iba pasando algunas funciones a software para minimizar el coste; COSYMA colocaba todas las funciones vía software e iba pasando funciones a los dispositivos hardware para obtener las prestaciones requeridas. Los diseñadores de los sistemas hardware/software tenían que analizar las prestaciones en tres dimensiones: hardware, software y sistema: Las prestaciones hardware tenían como meta determinar la máxima frecuencia de reloj de la unidad hardware. Las prestaciones software tenían como meta determinar el tiempo de ejecución del caso peor (en esencia, el mismo problema que en el caso hardware); no obstante su solución es más difícil de hallar debido a la menor investigación desarrollada en este campo. Las prestaciones de sistema también son complicadas, ya que varios programas pueden ser ejecutados de forma concurrente (o varias partes de varios programas), que a su vez, pueden ser ejecutados concurrentemente con el procesado de aplicaciones específicas. Ambos sistemas (VULCAN y COSYMA) tratan de reducir la complejidad, evitando estas concurrencias, y por lo tanto, todas las operaciones (software y hardware) son consideradas como secuenciales. Para realizar estos análisis de prestaciones se encontró en la cosimulación un aliado muy importante, incorporándolo como elemento esencial a la metodología de codiseño. El reto consiste en la realización de una cosimulación en niveles de abstracción mixtos para ejecutar los suficientes vectores de test para validar el diseño. Uno de los cosimuladores que primero surgieron fue PTOLEMY. Una vez que las prestaciones anteriores, tiempos de ejecución y de procesado, iban siendo resueltas; otras prestaciones iban adquiriendo una importancia creciente. Entre estas prestaciones podemos encontrar la estimación del coste hardware, el consumo de potencia, arquitecturas más generales, protocolos. Actualmente, y gracias al auge de las FPGA, el particionado hardware/software es una tarea de diseño práctica. Varios fabricantes han desarrollado placas que combinan FPGA (en la que se implementaría los dispositivos hardware) y CPUs (en la que se implementaría el desarrollo software), conteniendo la arquitectura típica de un sistema empotrado. 3
- 4. Sistemas en Tiempo Real Componentes de un sistema empotrado Un sistema empotrado en principio estaría formando por un microprocesador y un software que se ejecute sobre este. Sin embargo este software necesitara sin duda un lugar donde poder guardarse para luego ser ejecutado por el procesador. Esto podría tomar la forma de memoria RAM o ROM, Todo sistema empotrado necesitara en alguna medida una cierta cantidad de memoria, la cual puede incluso encontrarse dentro del mismo chip del procesador. Además de esto normalmente un sistema embebido contara con una serie de salidas y entradas necesarias para comunicarse con el mundo exterior. Debido a que las tareas realizadas por sistemas empotrados son de relativa sencillez, los procesadores comúnmente usados cuentan con registros de 8 o 16 bits. En su memoria solo reside el programa destinado a gobernar una aplicación determinada. Sus líneas de entrada/salida soportan el conexionado de los sensores y actuadores del dispositivo a controlar y todos los recursos complementarios disponibles tiene como única finalidad atender a sus requerimientos. Estas son las únicas características que tienen en común los sistemas embebidos, todo lo demás será totalmente diferente para cada sistema embebido en particular debido a la inmensa diversidad de aplicaciones disponibles. Heterogeneidad Un sistema empotrado es un sistema con un relativo grado de heterogeneidad porla combinación de hardware a medida (como es el dispositivo ASIC) y software empotrado(como son los programas que controlan tanto al microcontrolador como a los DSP o elementosprogramables). Incluso, dentro de cada uno de estos grandes grupos, existe heterogeneidad yaque los dispositivos ASIC utilizarán diferentes estilos de diseño (por lo general); y en cuanto alcomponente software, habrá diferencia de estilos en la programación del microcontrolador yde los DSP. Esta heterogeneidad impone una de las principales partes del diseño de cualquier sistema empotrado: decidir qué funcionalidad se implementará vía software y cuál vía hardware. De 4
- 5. Sistemas en Tiempo Real hecho esta decisión impondrá la arquitectura del sistema completo, ya que nos indicarálos diferentes componentes que son necesarios desarrollar. Esta heterogeneidad impone una de las principales partes del diseño de cualquier sistema empotrado: decidir quéfuncionalidad se implementará vía software y cuál vía hardware. Dehecho esta decisiónimpondrá la arquitectura del sistema completo, ya que nos indicar. Losdiferentes componentes que son necesarios desarrollar. Un ejemplo detallado está en la imagen, en este sistema podemos apreciar la CPU y la memoria, junto con una amplia variedad de interfaces que permite al sistema medir, manipular e interactuar con el entorno exterior. En esta imagen podemos ver que existen dos tipos de comunicación: una comunicación en el interior del sistema (que se realizará a través de un bus de sistema), y una comunicación externa (del sistema con el exterior). Bus de sistema Comunicación exterior 5
- 6. Sistemas en Tiempo Real Módulos La comunicación adquiere gran importancia en los sistemas empotrados. Lo normal es que el sistema pueda comunicarse mediante interfaces estándar de cable o inalámbricas. Así un SI normalmente incorporará puertos de comunicaciones del tipo RS-232, RS- 485, SPI, I²C, CAN, USB, IP, Wi-Fi, GSM, GPRS, DSRC, etc. El subsistema de presentación tipo suele ser una pantalla gráfica, táctil, LCD, alfanumérico, etc. Display LCD alfanumérico Se denominan actuadores a los posibles elementos electrónicos que el sistema se encarga de controlar. Puede ser un motor eléctrico, un conmutador tipo relé etc. El más habitual puede ser una salida de señal PWM para control de la velocidad en motores de corriente continua. Actuadores de un robot El módulo de E/S analógicas y digitales suele emplearse para digitalizar señales analógicas procedentes de sensores, activar diodos LED, reconocer el estado abierto cerrado de un conmutador o pulsador, etc. Matriz de diodos LED para iluminación 6
- 7. Sistemas en Tiempo Real El módulo de reloj es el encargado de generar las diferentes señales de reloj a partir de un único oscilador principal. El tipo de oscilador es importante por varios aspectos: por la frecuencianecesaria, por la estabilidad necesaria y por el consumo de corriente requerido. El oscilador con mejores características en cuanto a estabilidad y coste son los basados en resonador de cristal de cuarzo, mientras que los que requieren menor consumo son los RC. Mediante sistemas PLL se obtienen otras frecuencias con la misma estabilidad que el oscilador patrón. Módulos osciladores de cristal de cuarzo El módulo de energía (power) se encarga de generar las diferentes tensiones y corrientes necesarias para alimentar los diferentes circuitos del SE. Usualmente se trabaja con un rango de posibles tensiones de entrada que mediante conversores ac/dc o dc/dc se obtienen las diferentes tensiones necesarias para alimentar los diversos componentes activos del circuito. Además de los conversores ac/dc y dc/dc, otros módulos típicos, filtros, circuitos integrados supervisores de alimentación, etc. El consumo de energía puede ser determinante en el desarrollo de algunos sistemas embebidos que necesariamente se alimentan con baterías, con lo que el tiempo de uso del SE suele ser la duración de la carga de las baterías. 7
- 8. Sistemas en Tiempo Real Arquitectura básica más empleada Un PC empotrado posee una arquitectura semejante a la de un PC. Brevemente éstos sonlos elementos básicos: Microprocesador Es el encargado de realizar las operaciones de cálculo principales del sistema. Ejecutacódigo para realizar una determinada tarea y dirige el funcionamiento de los demáselementos que le rodean, a modo de director de una orquesta. Memoria En ella se encuentra almacenado el código de los programas que el sistema puedeejecutar así como los datos. Su característica principal es que debe tener un acceso delectura y escritura lo más rápido posible para que el microprocesador no pierda tiempoen tareas que no son meramente de cálculo. Al ser volátil el sistema requiere de unsoporte donde se almacenen los datos incluso sin disponer de alimentación o energía. Caché Memoria más rápida que la principal en la que se almacenan los datos y el códigoaccedido últimamente. Dado que el sistema realiza microtareas, muchas vecesrepetitivas, la caché hace ahorrar tiempo ya que no hará falta ir a memoria principal si eldato o la instrucción ya se encuentra en la caché. Dado su alto precio tiene un tamañomuy inferior (8 – 512 KB) con respecto a la principal (8 – 256 MB). Disco duro En él la información no es volátil y además puede conseguir capacidades muy elevadas. A diferencia de la memoria que es de estado sólido éste suele ser magnético. Pero suexcesivo tamaño a veces lo hace inviable para PCs embebidos, con lo que se requierensoluciones como discos de estado sólido. Existen en el mercado varias soluciones deesta clase (DiskOnChip, CompactFlash, IDE Flash Drive, etc.) con capacidadessuficientes para la mayoría de sistemas embebidos (desde 2 hasta mas de 1 GB). Elcontrolador del disco duro de PCs estándar cumple con el estándar IDE y es un chipmás de la placa madre. 8
- 9. Sistemas en Tiempo Real Disco flexible Su función es la de un disco duro pero con discos con capacidades mucho más pequeñasy la ventaja de su portabilidad. Siempre se encuentra en un PC estándar pero no así enun PC embebido. BIOS-ROM BIOS (Basic Input & Output System, sistema básico de entrada y salida) es código quees necesario para inicializar el ordenador y para poner en comunicación los distintoselementos de la placa madre. La ROM (ReadOnlyMemory, memoria de sólo lectura novolátil) es un chip donde se encuentra el código BIOS. CMOS-RAM Es un chip de memoria de lectura y escritura alimentado con una pila donde sealmacena el tipo y ubicación de los dispositivos conectados a la placa madre (discoduro, puertos de entrada y salida, etc.). Además contiene un reloj en permanentefuncionamiento que ofrece al sistema la fecha y la hora. Chip Set Chip que se encarga de controlar las interrupciones dirigidas al microprocesador, elacceso directo a memoria (DMA) y al bus ISA, además de ofrecer temporizadores, etc. Es frecuente encontrar la CMOS-RAM y el reloj de tiempo real en el interior del ChipSet. Entradas al sistema Pueden existir puertos para mouse, teclado, vídeo en formato digital, comunicaciones serie o paralelo, etc. Salidas al sistema Puertos de vídeo para monitor o televisión, pantallas de cristal líquido, altavoces, comunicaciones serie oparalelo, etc. 9
- 10. Sistemas en Tiempo Real En resumen 1. Requerimientos de aplicación 2. Procesador y arquitectura 3. SO-TR y Arquitectura de software pSOS+ VxWorks Neutrino lynxOS nucleus 4. Herramientas de desarrollo (compilador, depurador, simulador) Entorno de desarrollo 10
- 11. Sistemas en Tiempo Real Clasificación de sistemas empotrados Una de las clasificaciones de los sistemas empotrados es acorde a su interacción con el resto del entorno. Sistemas reactivos.- son aquellos sistemas que siempre interactúan con el exterior, de tal forma que la velocidad de operación del sistema deberá ser la velocidad del entorno exterior. Sistemas interactivos.- son aquellos sistemas que siempre interact.an con el exterior, de tal forma que la velocidad de operación del sistema deberá ser la velocidad del propio sistema empotrado. Sistemas transformacionales.- son aquellos sistemas que no interactúan con el exterior, únicamente toma un bloque de datos de entrada y lo transforma en un bloque de datos de salida, que no es necesario en el entorno. Dentro de los sistemas reactivos podemos incluir el sistema de control aéreo de un aeropuerto, ya que la velocidad del sistema dependerá de la velocidad con la que lleguen los datos de los diferentes aviones que se acerquen o salgan del mismo. En cuanto a los sistemas interactivos, podemos incluir a cualquier tipo de máquina de videojuegos, ya que la velocidad del sistema depende de él mismo, y el exterior (es decir el usuario del videojuego) se debe adecuar a su velocidad. Por último, dentro de los sistemas transformacionales podemos incluir a los postes de publicidad electrónicos, en los que no existe ningún tipo de interactividad excepto la entradade datos iniciales y la salida de datos finales. Aunque estos tres tipos de sistemas cumplen con la definición de sistema empotrado, se suelen tomar como tal a los sistemas reactivos, ya que su auge surgió cuando se adaptó estos diseños a este tipo de problemas. De hecho, los sistemas reactivos son más comúnmente conocidos como sistemas de tiempo real. 11
- 12. Sistemas en Tiempo Real Características I Recursos limitados • Procesador, memoria, pantalla, etc. Dispositivos de E/S son especiales para cada sistema. • No hay teclado ni pantalla normales. El computador debe reaccionar a tiempo ante los cambios en el sistema que controla. • Una acción retrasada puede ser inútil o peligrosa. Características II Estos sistemas emplearán una combinación de recursos hardware y software para realizar una función específica. Estos sistemas realizan una única función o un conjunto muy limitado de funciones (no suelen ser de propósito general) La potencia, el coste y la realizabilidad suelen ser los principales factores de coste. El diseño de procesadores de aplicación específica suelen ser un componente significativo de estos sistemas. Están frecuentemente conectados a ambientes físicos a través de sensores y actuadores. Son sistemas híbridos (partes análogas + digitales). Típicamente son sistemas reactivos:“Un sistema reactivo es uno que está en interacción continua con su ambiente y su ejecución es la un ritmo determinado por ese ambiente” [Bergé, 1995] Su comportamiento depende de su entrada y su estado actual. 12
- 13. Sistemas en Tiempo Real Características III Concurrencia Los componentes del sistema funcionan simultáneamente, por lo que el sistema deberá operar a la vez. Fiabilidad y seguridad El sistema debe ser fiable y seguro frente a errores, ya que puede requerir un comportamiento autónomo. El manejo de estos errores puede ser vía hardware o software; aunque la utilización software nos dará un sistema menos robusto. Interacción con dispositivos físicos Los sistemas empotrados interaccionan con el entorno a través de dispositivos E/S no usuales, por lo que suele ser necesario un acondicionamiento de las diferentes señales. Robustez El sistema empotrado se le impondrá la necesidad de la máxima robustez ya que las condiciones de uso no tienen por qué ser “buenas”, sino que pueden estar en el interior de un vehículo con diferentes condiciones de operación. Bajo consumo El hecho de poder utilizar el sistema en ambientes hostiles puede implicar la necesidad de operaciones sin cables. Por lo tanto, un menor consumo implica una mayor autonomía de operación. Precio reducido Esta característica es muy útil cuando estamos hablando de características de mercado. Esta situación no es nada inusual en el campo de los sistemas empotrados ya que tienen una gran cantidad de aplicaciones comerciales, tanto industriales como de consumo. Pequeñas dimensiones Las dimensiones de un sistema empotrado no dependen sólo de sí mismo sino también del espacio disponible en el cual dicho sistema va a ser ubicado. 13
- 14. Sistemas en Tiempo Real Aplicaciones de un sistema empotrado Los lugares donde se pueden encontrar los sistemas empotrados son numerosos y de varias naturalezas. A continuación ejemplos: En una fábrica, para controlar un proceso de montaje o producción. Una máquina que se encargue de una determinada tarea hoy en día contiene numerosos circuitos electrónicos y eléctricos para el control de motores, hornos, etc. que deben ser gobernados por un procesador, el cual ofrece un interfaz persona – máquina para ser dirigido por un operario e informarle al mismo de la marcha del proceso. Puntos de servicio o venta (POS, Point Of Service). Las cajas donde se paga la compra en un supermercado son cada vez más completas, integrando teclados numéricos, lectores de códigos de barras mediante láser, lectores de tarjetas bancarias de banda magnética o chip, pantalla alfanumérica de cristal líquido, etc. El sistema empotrado en este caso requiere numerosos conectores de entrada y salida y unas características robustas para la operación continuada. Puntos de información al ciudadano. En oficinas de turismo, grandes almacenes, bibliotecas, etc. existen equipos con una pantalla táctil donde se puede pulsar sobre la misma y elegir la consulta a realizar, obteniendo una respuesta personalizada en un entorno gráfico amigable. Decodificadores y set-top boxes para la recepción de televisión. Cada vez existe un mayor número de operadores de televisión que aprovechando las tecnologías vía satélite y de red de cable ofrecen un servicio de televisión de pago diferenciado del convencional. En primer lugar envían la señal en formato digital MPEG-2 con lo que es necesario un procesado para decodificarla y mandarla al televisor. Además viaja cifrada para evitar que la reciban en claro usuarios sin contrato, lo que requiere descifrarla en casa del abonado. También ofrecen un servicio de televisión interactiva o web-TV que necesita de un software específico para mostrar páginas web y con ello un sistema basado en procesador con salida de señal de televisión. Sistemas radar de aviones. El procesado de la señal recibida o reflejada del sistema radar embarcado en un avión requiere alta potencia de cálculo además de ocupar poco espacio, pesar poco y soportar condiciones extremas de funcionamiento (temperatura, presión atmosférica, vibraciones, etc.). Equipos de medicina en hospitales y ambulancias UVI – móvil. 14
- 15. Sistemas en Tiempo Real Máquinas de revelado automático de fotos. Cajeros automáticos. Pasarelas (Gateways) Internet-LAN. Y un sin fin de posibilidades aún por descubrir o en estado embrionario como son las neveras inteligentes que controlen su suministro vía Internet, PC de bolsillo, etc. Ejemplo de un coche Control automático de velocidad Control climatización Visualización (veloc., rpm, consumo, niveles, alarmas,..) Órdenes del conductor (Comienzo de conteo de velocidad, establecimiento temperatura interior, puesta en hora, …) 15
- 16. Sistemas en Tiempo Real Un ejemplo típico de un sistema empotrado puede ser el sistema de navegación de un vehículo. Supongamos que tenemos un vehículo con tres sensores en la parte delantera, con un radio de acción de diez metros cada uno, tal como se muestra en la imagen. Al sistema se le introduce el punto de inicio y el punto de destino, y debe ser capaz de sortear los posibles obstáculos que se encuentre en su trayectoria. 16
- 17. Sistemas en Tiempo Real Otros: Electrónica de consumo Videos, HIFI, televisión, Lavadoras, frigoríficos, lavaplatos, MP3, PDA’s, cámaras digitales, cámaras de video, videoconsolas, microondas, etc Automóviles Control velocidad, climatización, visualización, ABS, ASR, Inyección Telecomunicaciones Radios, teléfonos móviles, GPS Aviónica, espacial Computadores de vuelo, de misión Instrumentación Redes Cortafuegos, routers, switches, etc. 17
- 18. Sistemas en Tiempo Real GLOSARIO Dispositivo ASIC Un Circuito Integrado para Aplicaciones Específicas (o ASIC, por sus siglas en inglés) es un circuito integrado hecho a la medida para un uso en particular, en vez de ser concebido para propósitos de uso general. Se usan para una función especifica. Por ejemplo, un chip diseñado únicamente para ser usado en un teléfono móvil es un ASIC. DSP Un procesador digital de señales o DSP (sigla en inglés de digital signalprocessor) es un sistema basado en un procesador o microprocesador que posee unconjunto de instrucciones, un hardware y un software optimizados para aplicaciones que requieran operaciones numéricas a muy alta velocidad. Debido a esto es especialmente útil para el procesado y representación de señales analógicas en tiempo real: en un sistema que trabaje de esta forma (tiempo real) se reciben muestras (samples en inglés), normalmente provenientes de un conversor analógico/digital (ADC) .MIT Media Lab El MIT Media Lab (también conocido como el Media Lab) es un laboratorio dentro de la Escuela de Arquitectura y Planificación en el Instituto de Tecnología de Massachusetts. Dedicado a los proyectos de investigación en la convergencia del diseño, la multimedia y la tecnología. FPGA Una FPGA (del inglés Field ProgrammableGateArray) es un dispositivo semiconductor que contiene bloques de lógica cuya interconexión y funcionalidad puede ser configurada 'in situ' mediante un lenguaje de descripción especializado. La lógica programable puede reproducir desde funciones tan sencillas como las llevadas a cabo por una puerta lógica o unsistemacombinacional hasta complejos sistemas en un chip. PWM La modulación por ancho de pulsos (también conocida como PWM, siglas en inglés de pulse- widthmodulation) de una señal o fuente de energía es una técnica en la que se modifica el ciclo de trabajo de una señal periódica (una senoidal o unacuadrada, por ejemplo), ya sea para transmitir información a través de un canal de comunicaciones o para controlar la cantidad de energía que se envía a una carga 18
- 19. Sistemas en Tiempo Real LINKOGRAFIA Sistema Empotrado http://laurel.datsi.fi.upm.es/proyectos/teldatsi/introduccion http://www.clubdeinvestigacion.com/contenido/articles/sistemas-empotrados.html http://webdiis.unizar.es/~joseluis/SE.pdf Sistemas de tiempo real https://docs.google.com/a/unprg.edu.pe/viewer?a=v&pid=sites&srcid=YWx1bW5vcy5leGEud W5pY2VuLmVkdS5hcnx0cmVhbHxneDo2OTM1YzE2NTg1YWI0ZDI4 Introducción a sistemas empotrados http://www.eis.uva.es/~fergay/III/empotrados.pdf Sistemas embebidos http://es.wikipedia.org/wiki/Sistema_embebido http://www.indicart.com.ar/seminario- embebidos/Modelado%20de%20Sistemas%20Embebidos.pdf ftp://soporte.uson.mx/publico/18_INGENIERIA%20MECATRONICA/Microcontroladores_D r.%20Victor_Benitez/U1_Introducci%F3n%20a%20los%20sistemas%20embebidos.pdf http://ocw.um.es/ingenierias/sistemas-embebidos/material-de-clase-1/ssee-t02.pdf Aplicaciones de los sietmas embebidos http://www.tecnicaindustrial.es/tiadmin/numeros/15/07/a07.pdf 19