Descargado 666 veces
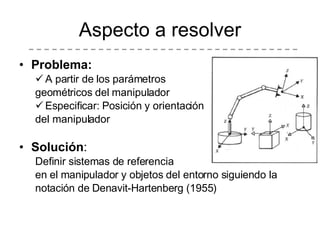
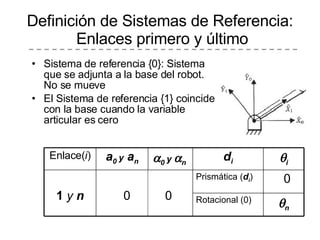
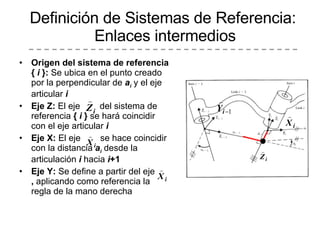
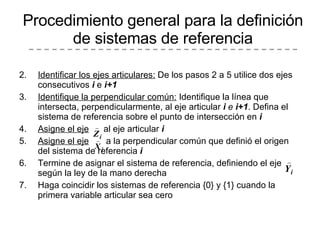
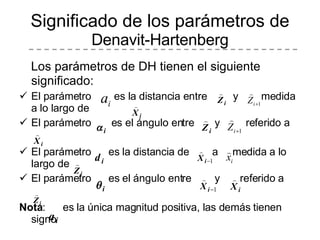
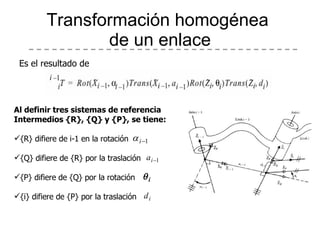
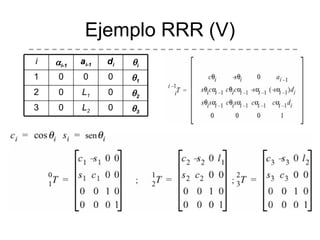
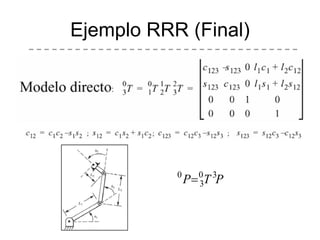
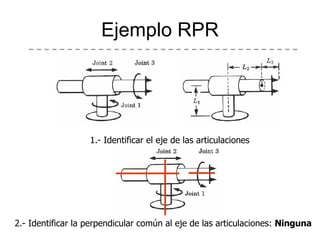
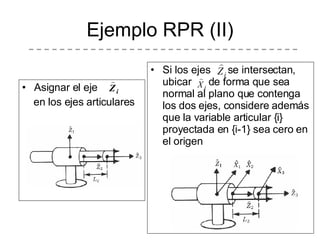
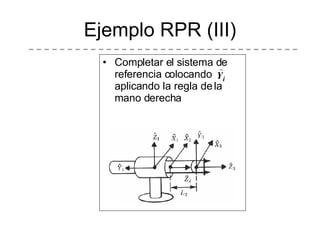
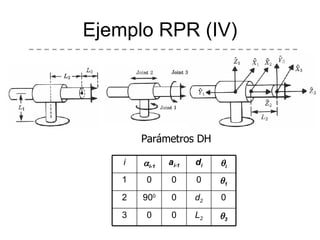
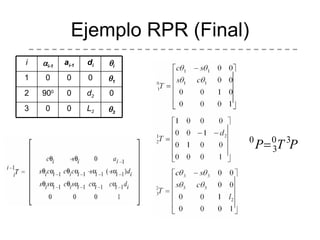
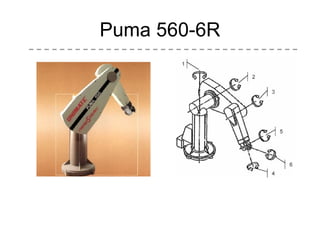
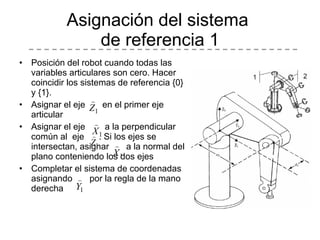
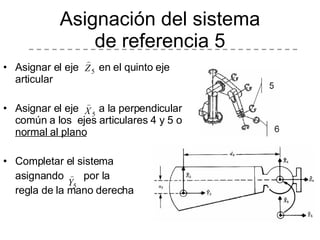
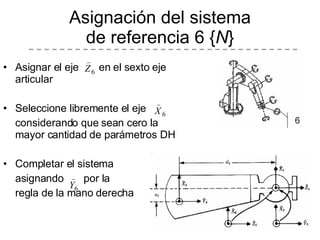
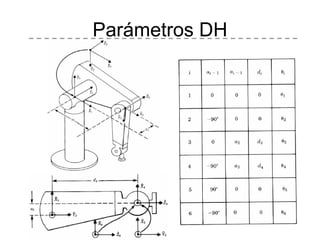
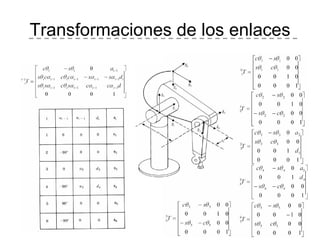
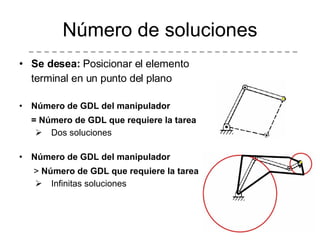
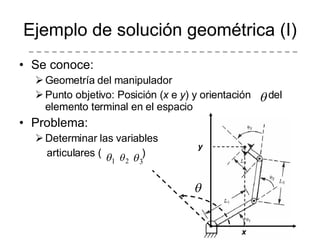
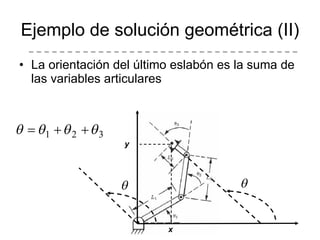
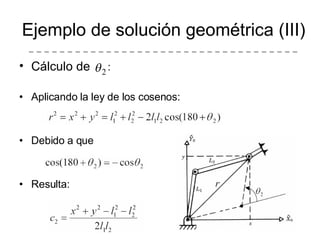
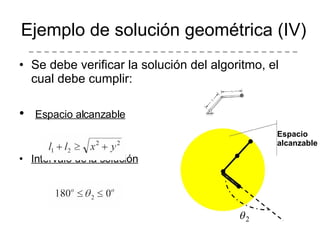
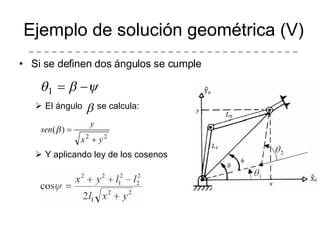

Este documento describe los conceptos básicos de la cinemática de los manipuladores, incluyendo la definición de sistemas de referencia, parámetros de Denavit-Hartenberg, transformaciones homogéneas y cinemática directa e inversa. Explica cómo definir los sistemas de referencia de los enlaces de un manipulador y calcular la posición y orientación del efecto final en función de las variables articulares usando la cinemática directa, así como cómo resolver el problema inverso de la cinemática.























































































