Servimotores.
•Descargar como PPTX, PDF•
0 recomendaciones•204 vistas

Los tres servomotores interactivos le permiten al robot moverse pero deben alinear su velocidad para un movimiento suave. Cada servomotor incluye un sensor de rotación integrado que puede programarse de 360 a 180 grados. Las lámparas pueden encenderse y apagarse en patrones para indicar el estado de un sensor o motor y también pueden usarse con un sensor fotosensible.

Recomendados
Más contenido relacionado
La actualidad más candente
Destacado
Destacado (10)
Similar a Servimotores.
Similar a Servimotores. (20)
Más de Nicolas Tellez
Más de Nicolas Tellez (19)
Servimotores.
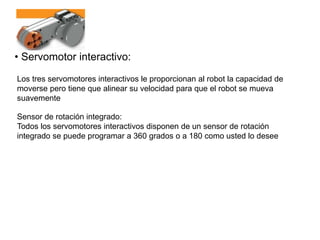
- 1. • Servomotor interactivo: Los tres servomotores interactivos le proporcionan al robot la capacidad de moverse pero tiene que alinear su velocidad para que el robot se mueva suavemente Sensor de rotación integrado: Todos los servomotores interactivos disponen de un sensor de rotación integrado se puede programar a 360 grados o a 180 como usted lo desee
- 2. • Seleccione el Icono de rotación De motor • Seleccione el puerto en el cual ha colocado el motor Ahora intente fijar una rueda al motor y mida las rotaciones presionando la rueda sobre el suelo
- 3. • Lámparas: Se pueden encender y apagar para crear patrones intermitentes de luz también pueden usarse para utilizar el sensor fotosensible para mostrar que un motor esta encendido o para indicar el estado del sensor Utilice los cables conversores para conectar las lámparas a los puertos de salida A, B o C
- 4. • Utilice las lámparas para Activar el sensor seleccione La luz ambiental • Haga brillar la lámpara Cerca del sensor • Note que la lectura cambia