

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (12)
Similar a Motor electrico
Similar a Motor electrico (20)
Motor electrico
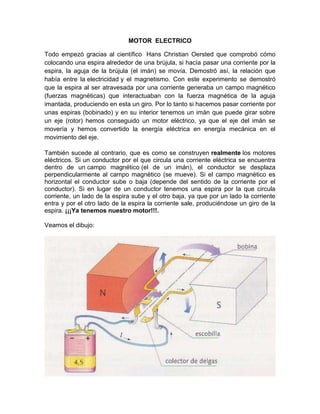
- 1. MOTOR ELECTRICO Todo empezó gracias al científico Hans Christian Oersted que comprobó cómo colocando una espira alrededor de una brújula, si hacía pasar una corriente por la espira, la aguja de la brújula (el imán) se movía. Demostró así, la relación que había entre la electricidad y el magnetismo. Con este experimento se demostró que la espira al ser atravesada por una corriente generaba un campo magnético (fuerzas magnéticas) que interactuaban con la fuerza magnética de la aguja imantada, produciendo en esta un giro. Por lo tanto si hacemos pasar corriente por unas espiras (bobinado) y en su interior tenemos un imán que puede girar sobre un eje (rotor) hemos conseguido un motor eléctrico, ya que el eje del imán se movería y hemos convertido la energía eléctrica en energía mecánica en el movimiento del eje. También sucede al contrario, que es como se construyen realmente los motores eléctricos. Si un conductor por el que circula una corriente eléctrica se encuentra dentro de un campo magnético (el de un imán), el conductor se desplaza perpendicularmente al campo magnético (se mueve). Si el campo magnético es horizontal el conductor sube o baja (depende del sentido de la corriente por el conductor). Si en lugar de un conductor tenemos una espira por la que circula corriente, un lado de la espira sube y el otro baja, ya que por un lado la corriente entra y por el otro lado de la espira la corriente sale, produciéndose un giro de la espira. ¡¡¡Ya tenemos nuestro motor!!!. Veamos el dibujo:
- 2. Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de campos electromagnéticosvariables. Algunos de los motores eléctricos son reversibles, pueden transformar energía mecánica en energía eléctrica funcionando comogeneradores. Los motores eléctricos de tracción usados en locomotoras o en automóviles híbridos realizan a menudo ambas tareas, si se los equipa con frenos regenerativos. Son muy utilizados en instalaciones industriales, comerciales y particulares. Pueden funcionar conectados a una red de suministro eléctrico o abaterías. Así, en automóviles se están empezando a utilizar en vehículos híbridos para aprovechar las ventajas de ambos. . VENTAJAS En diversas circunstancias presenta muchas ventajas respecto a los motores de combustión: A igual potencia, su tamaño y peso son más reducidos. Se pueden construir de cualquier tamaño. Tiene un par de giro elevado y, según el tipo de motor, prácticamente constante. Su rendimiento es muy elevado (típicamente en torno al 75%, aumentando a medida que se incrementa la potencia de la máquina). Este tipo de motores no emite contaminantes, aunque en la generación de energía eléctrica de la mayoría de las redes de suministro sí emiten contaminantes. MOTORES DE CORRIENTE CONTINUA El motor de corriente continua es una máquina que convierte la energía eléctrica continua en mecánica, provocando un movimiento rotatorio. En la actualidad existen nuevas aplicaciones con motores eléctricos que no producen movimiento rotatorio, sino que con algunas modificaciones, ejercen tracción sobre un riel. Estos motores se conocen como motores lineales. Esta máquina de corriente continua es una de las más versátiles en la industria. Su fácil control de posición, par y velocidad la han convertido en una de las mejores opciones en aplicaciones de control y automatización de procesos. Pero con la llegada de la electrónica su uso ha disminuido en gran medida, pues los motores de corriente alterna, del tipo asíncrono, pueden ser controlados de igual forma a precios más accesibles para el consumidor medio de la industria. A pesar de esto los motores de corriente continua se siguen utilizando en muchas
- 3. aplicaciones de potencia (trenes y tranvías) o de precisión (máquinas, micro motor, etc.) La principal característica del motor de corriente continua es la posibilidad de regular la velocidad desde vacío a plena carga. Su principal inconveniente, el mantenimiento, muy caro y laborioso. Una máquina de corriente continua (generador o motor) se compone principalmente de dos partes, un estator que da soporte mecánico al aparato y tiene un hueco en el centro generalmente de forma cilíndrica. En el estator además se encuentran los polos, que pueden ser de imanes permanentes o devanados con hilo de cobre sobre núcleo de hierro. El rotor es generalmente de forma cilíndrica, también devanado y con núcleo, al que llega la corriente mediante dos escobillas. Los motores de corriente continua se clasifican según la forma como estén conectados, en: Motor serie Motor compound Motor shunt Motor eléctrico sin escobillas Además de los anteriores, existen otros tipos que son utilizados en electrónica: Motor paso a paso Servomotor Motor sin núcleo MOTOR DE CORRIENTE ALTERNA Se denomina motor de corriente alterna a aquellos motores eléctricos que funcionan con corriente alterna. Un motor es una máquina motriz, esto es, un aparato que convierte una forma determinada de energía en energía mecánica de rotación o par. Un motor eléctrico convierte la energía eléctrica en fuerzas de giro por medio de la acción mutua de los campos magnéticos. Un generador eléctrico, por otra parte, transforma energía mecánica de rotación en energía eléctrica y se le puede llamar una máquina generatriz de fem. Las dos formas básicas son el generador de corriente continua y el generador de corriente alterna, este último más correctamente llamado alternador. Todos los generadores necesitan una máquina motriz (motor) de algún tipo para producir la fuerza de rotación, por medio de la cual un conductor puede cortar las líneas de fuerza magnéticas y producir una fem. La máquina más simple de los motores y generadores es el alternador.
- 4. MOTOR DE PASO El motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un conversor digital-analógico (D/A) y puede ser gobernado por impulsos procedentes de sistemas lógicos. Este motor presenta las ventajas de tener alta precisión y repetitividad en cuanto al posicionamiento. Entre sus principales aplicaciones destacan como motor de frecuencia variable, motor de corriente continua sin escobillas, servomotores y motores controlados digitalmente. Existen 3 tipos fundamentales de motores paso a paso: el motor de reluctancia variable, el motor de magnetización permanente, y el motor paso a paso híbrido. TIPOS DE MOTORES DE PASO El motor de paso de rotor de imán permanente: Permite mantener un par diferente de cero cuando el motor no está energizado. Dependiendo de la construcción del motor, es típicamente posible obtener pasos angulares de 7.5, 11.25, 15, 18, 45 o 90°. El ángulo de rotación se determina por el número de polos en el estator El motor de paso de reluctancia variable (VR): Tiene un rotor multipolar de hierro y un estator devanado laminado, y rota cuando los dientes del rotor son atraídos a los dientes del estator electromagnéticamente energizados. La inercia del rotor de un motor de paso de reluctancia variable es pequeña y la respuesta es muy rápida, pero la inercia permitida de la carga es pequeña. Cuando los devanados no están energizados, el par estático de este tipo de motor es cero. Generalmente, el paso angular de este motor de paso de reluctancia variable es de 15° El motor híbrido de paso: Se caracteriza por tener varios dientes en el estator y en el rotor, el rotor con un imán concéntrico magnetizado axialmente alrededor de su eje. Se puede ver que esta configuración es una mezcla de los tipos de reluctancia variable e imán permanente. Este tipo de motor tiene una alta precisión y alto par y se puede configurar para suministrar un paso angular tan pequeño como 1.8°. Motores paso a paso Bipolares: Estos tienen generalmente 4 cables de salida. Necesitan ciertos trucos para ser controlados debido a que requieren del cambio de dirección de flujo de corriente a través de las bobinas en la secuencia apropiada para realizar un movimiento.
- 5. Motores paso a paso unipolares: estos motores suelen tener 5 ó 6 cables de salida dependiendo de su conexionado interno. Este tipo se caracteriza por ser más simple de controlar, estos utilizan un cable común a la fuente de alimentación y posteriormente se van colocando las otras lineas a tierra en un orden especifico para generar cada paso, si tienen 6 cables es porque cada par de bobinas tiene un común separado, si tiene 5 cables es porque las cuatro bobinas tiene un solo común; un motor unipolar de 6 cables puede ser usado como un motor bipolar si se deja las lineas del común al aire. USOS Los motores eléctricos se utilizan en la gran mayoría de las máquinas modernas. Su reducido tamaño permite introducir motores potentes en máquinas de pequeño tamaño, por ejemplo taladros o batidoras. CAMBIOS DE SENTIDO DE GIRO Para efectuar el cambio de sentido de giro de los motores eléctricos de corriente alterna se siguen unos simples pasos tales como: Para motores monofásicos únicamente es necesario invertir las terminales del devanado de arranque, esto se puede realizar manualmente o con relés conmutadores Para motores trifásicos únicamente es necesario invertir dos de las conexiones de alimentación correspondientes a dos fases de acuerdo a la secuencia de trifases. Para motores de a.c. es necesario invertir los contactos del par de arranque. REGULACION DE LA VELOCIAD EN LOS MOTORES En los motores asíncronos trifásicos existen dos formas de poder variar la velocidad, una es variando la frecuencia mediante un equipo electrónico especial y la otra es variando la polaridad gracias al diseño del motor. Esto último es posible en los motores de devanado separado, o los motores de conexión Dahlander pero solo es posible tener un cambio de polaridad limitado ej.: 2 polos y 4.