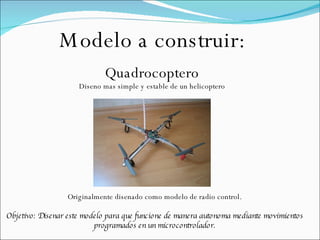
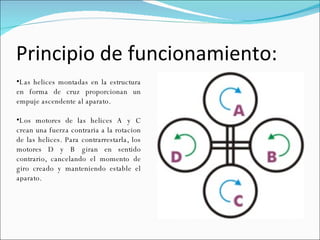
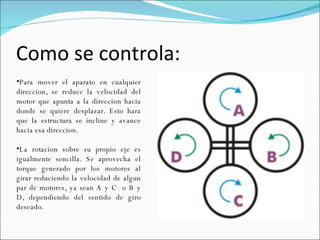
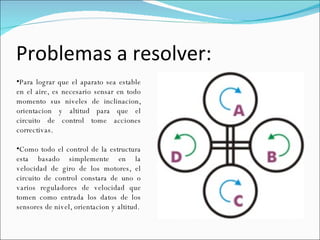
Este documento describe el diseño de un cuadricóptero autónomo controlado por un microcontrolador. Funciona mediante cuatro motores que controlan la inclinación y rotación del aparato. Se utilizarán sensores de inclinación, orientación y altitud, cuyos datos se usarán en un controlador PID analógico para regular la velocidad de los motores y mantener la posición programada. El microcontrolador PIC16F84 programará la posición deseada.

























































![Pasco[F][F][F][F][F][F][F][F][F] (3)[R] (1) (1).docx](https://cdn.slidesharecdn.com/ss_thumbnails/pascofffffffff3r11-260122185917-5ef4a718-thumbnail.jpg?width=640&height=640&fit=bounds)




