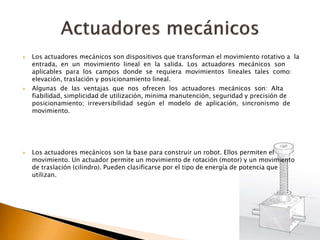
Los actuadores mecánicos convierten el movimiento rotativo en movimiento lineal y se utilizan comúnmente para aplicaciones que requieren movimiento lineal como elevación, traslación y posicionamiento. Los actuadores mecánicos son confiables, de fácil uso y precisos, y son la base para construir robots al permitir el movimiento a través de motores y cilindros.