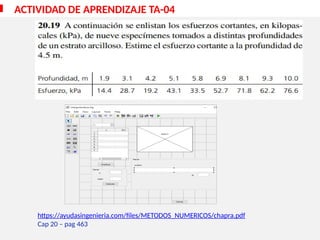
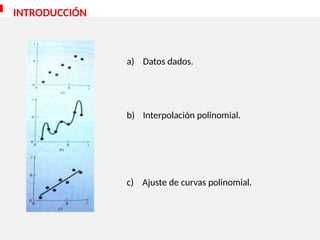
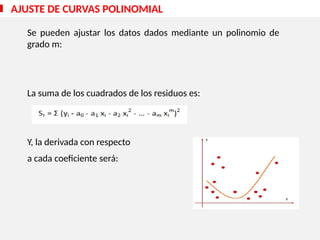
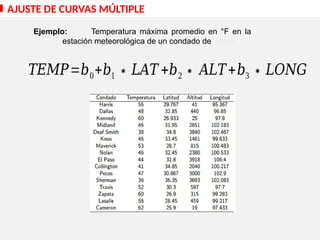
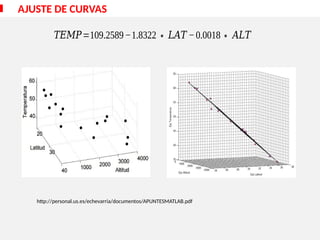
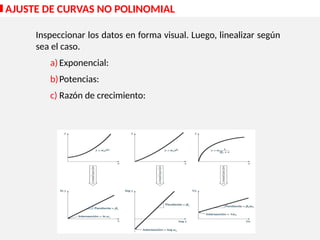
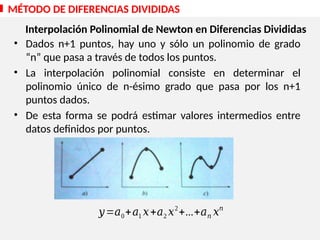
El documento abarca un curso de análisis numérico para ingenieros civiles, que incluye temas como sistemas de ecuaciones lineales, autovalores, integración numérica y ajuste de curvas usando MATLAB. Se detalla el ajuste de curvas lineales y polinomiales, así como métodos de interpolación, incluyendo polinomios de diferencias divididas y splines. Además, se ofrecen ejemplos prácticos y la aplicación de técnicas para estimar valores intermedios en conjuntos de datos.



![AJUSTE DE CURVAS POLINOMIAL
N=length(T);%numero de elementos
Sum_x=sum(T);
Sum_x2=sum(T.^2);
Sum_y=sum(u);
Sum_xy=sum(T.*u);
A=[N Sum_x
Sum_x Sum_x2 ] ;
B=[Sum_y ; Sum_xy];
x=inv(A)*B;
fprintf('a0 =% 7.4f n',x(1));
fprintf('a1 =% 7.4f n',x(2));
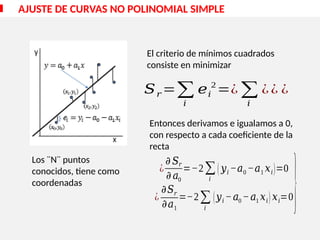
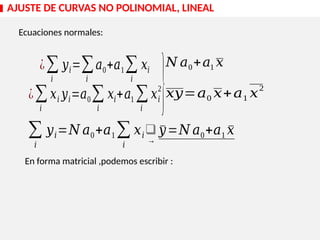
(𝑁 𝑥
𝑥 𝑥
2 )(𝑎0
𝑎1
)=
( 𝑦
𝑥𝑦 )
Energia(u)
2506.7
2582.8
2658.1
2733.7
2810.4
2967.9
3131.6
a0 =-1505.7093
a1 = 0.6415
T=[100, 150, 200, 250, 300 , 400, 500];
u=[2506.7 ,2582.8,2658.1 ,2733.7 , 2810.4, 2967.9, 3131.6];
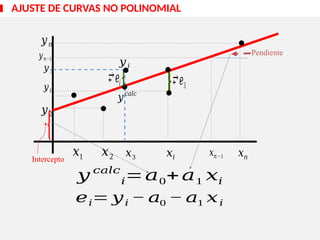
𝑦𝑐𝑎𝑙𝑐
𝑖=𝑎0+𝑎1 𝑥𝑖
i
Temp(T)
100
150
200
250
300
400
500](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-10-320.jpg)
![T=[100, 150, 200, 250,300 , 400, 500];% valores x
u=[2506.7 ,2582.8,2658.1 ,2733.7 , 2810.4, 2967.9, 3131.6];%valores y
x=u;y=T;
n=1;%grado uno(Lineal)
p=polyfit(x,y,n);
ycalc=polyval(p,x);
plot(u,T,'o',u, ycalc,'--')
title(sprintf('Grado del polinomio %d’,n));
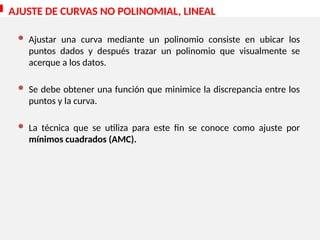
AJUSTE DE CURVAS NO POLINOMIAL, LINEAL](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-11-320.jpg)
![AJUSTE DE CURVAS POLINOMIAL
x=[0:5];
y=[2.1, 7.7, 13.6, 27.2, 40.9, 61.1];
n=2;%grado 2
p=polyfit(x,y,n);%[a2,a1,a0]
ycalc=polyval(p,x);%calcula usando
%los coeficientes del polinomio
%-----------------
plot(x,y,'o',x, ycalc,'--’)
title(sprintf('Grado del polinomio %d’,n));
p =1.8607 2.3593 2.4786](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-14-320.jpg)
![AJUSTE DE CURVAS POLINOMIAL
x=[10,20,30,40,50,60,70,80,90,100];
y=[23,45,60,82,111,140,167,198,200,220];
for n=2:5
p=polyfit(x,y,n);
ycalc=polyval(p,x);
subplot(2,2,n-1)
%----------------------
plot(x,y,'o',x,ycalc)
title(sprintf('Grado del polinomio %d',n));
end](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-15-320.jpg)
![AJUSTE DE CURVAS POLINOMIAL
M=[10 23;20 45;30 60;40 82;50 111];
n=2;
function [p]=ajuste_polinomial(M,n)
%ajuste_polinomial
%p=coeficientes del polinomio
%
x=M(:,1);
y=M(:,2);
p=polyfit(x,y,n);%p=[an,an-1,an-2.....a0]
yc=polyval(p,x);
x1=linspace(min(x),max(x),500);
y1=polyval(p,x1);
figure(1),clf
%plot(x,y,'ro',x1,y1,'b')
hold on
plot(x,y,'ro','LineWidth',2)
plot(x1,y1,'b','LineWidth',2)
hold off
grid
end
p =
0.0150 1.2300 10.8000](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-16-320.jpg)
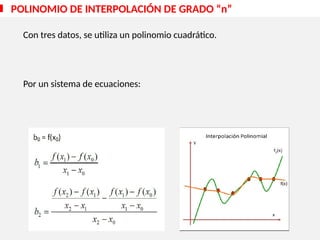
![MÉTODO DE DIFERENCIAS DIVIDIDAS
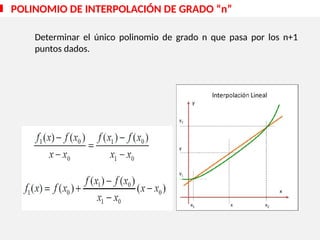
𝒇 𝒏 (𝒙)=𝒃𝟎+𝒃𝟏 (𝒙 − 𝒙𝟎)+…+𝒃𝒏 (𝒙 −𝒙𝟎 )(𝒙 − 𝒙𝟏)…(𝒙 − 𝒙𝒏−𝟏)
𝒇 [𝒙𝒊, 𝒙 𝒋]=
𝒇 (𝒙𝒊)− 𝒇 (𝒙 𝒋)
𝒙𝒊 −𝒙 𝒋
𝒇 [𝒙𝒊, 𝒙 𝒋 ,𝒙𝒌]=
𝒇 [𝒙𝒊, 𝒙 𝒋]− 𝒇 [𝒙𝒋 , 𝒙𝒌]
𝒙𝒊 −𝒙𝒌](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-22-320.jpg)
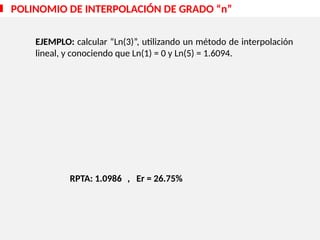
![x=[1 5];
y=[0,1.6094];
p=polyfit(x,y,1);
ycalc=polyval(p,x);
v3=polyval(p,3)
plot(x,y,'o',x,ycalc)
grid minor
p =0.4024x -0.4024
v3 =0.8047
POLINOMIO DE INTERPOLACIÓN DE GRADO “n”](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-25-320.jpg)
![p = -0.09690.9839x -0.8869
x=[1 2 5];
y=[0,0.6931,1.6094];
N=length(x);
x1=linspace(x(1),x(m),100);
n=N-1;%el grado del polinómio.
p=polyfit(x,y,m);
ycalc=polyval(p,x);
ycalc1=polyval(p,x1);
plot(x,y,'o',x1, ycalc1,'--')
title(sprintf('Grado del polinomio
%d’,n));
grid minor
p = -0.09690.9839x -0.8869
POLINOMIO DE INTERPOLACIÓN DE GRADO “n”](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-28-320.jpg)
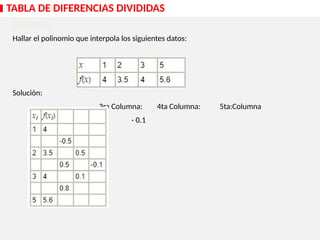
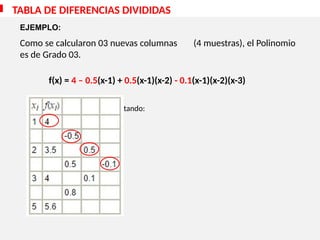
![TABLA DE DIFERENCIAS DIVIDIDAS
x=[1 2 3 5];
y=[4 3.5 4 5.6];
N=length(x);
M=zeros(N,N+1);
M(:,1)=x;
M(:,2)=y;
for i=2:N
for j=i:N f(x) = 4 – 0.5(x-1) + 0.5(x-1)(x-2) - 0.1(x-1)(x-2)(x-3)
M(j,i+1)=(M(j,i)-M(j-1,i))/(M(j,1)- M(j-i+1,1));
end
end](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-31-320.jpg)
![p = -0.1000+1.1000-3.1000x + 6.1000
v4 = 4.9000
x=[1 2 3 5];
y=[4 3.5 4 5.6];
N=length(x);
x1=linspace(x(1),x(N),100);
n=N-1;%grado del polinomio: 3
p=polyfit(x,y,n);
ycalc=polyval(p,x);%muestras
ycalc1=polyval(p,x1);%graf polinomio
v1=polyval(p,4)
plot(x,y,'o',x1,ycalc1)
grid minor
POLINOMIO DE INTERPOLACIÓN DE GRADO “n”](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-32-320.jpg)
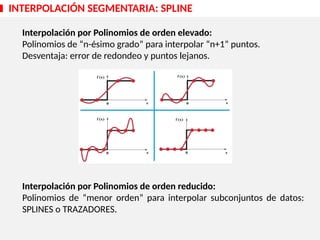
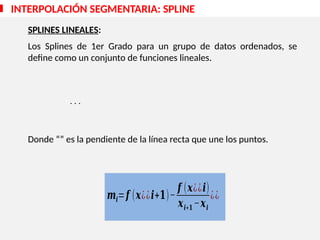
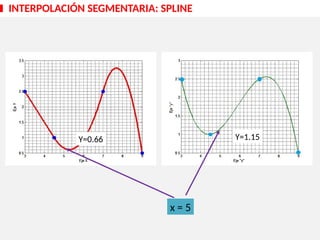
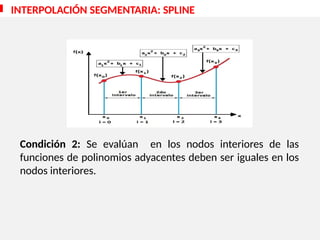
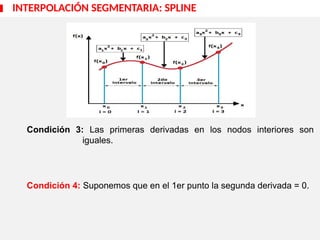
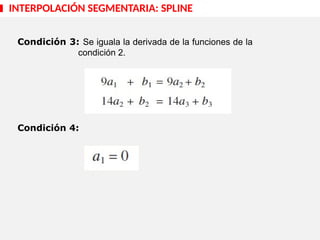
![INTERPOLACIÓN SEGMENTARIA: SPLINE
x = [ 3 4.5 7 9 ];
y = [ 2.5 1 2.5 0.5 ];
XX = 3 : 0.1 : 9;
YY=interp1(x,y,XX,'linear');
plot(x,y,'o',XX,YY)
Yo = interp1( x , y ,5)
Yo =1.3000](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-36-320.jpg)
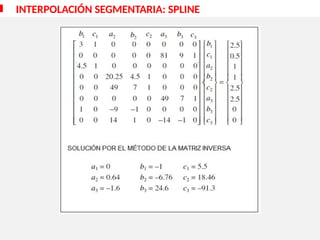
![A=[ 3 1 0 0 0 0 0 0; 0 0 0 0 0 81 9 1 ;
4.5 1 0 0 0 0 0 0; 0 0 20.25 4.5 1 0 0 0;
0 0 49 7 1 0 0 0; 0 0 0 0 0 49 7 1;
1 0 -9 -1 0 0 0 0;0 0 14 1 0 -14 -1 0]
b=[2.5; 0.5; 1; 1; 2.5 ;2.5 ;0; 0];
x=inv(A)*x
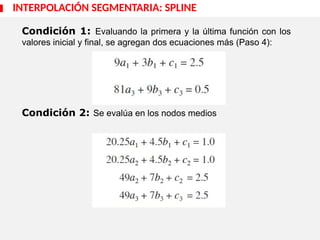
INTERPOLACIÓN SEGMENTARIA: SPLINE
x =-1.0000
5.5000
0.6400
-6.7600
18.4600
-1.6000
24.6000
-91.3000](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-46-320.jpg)
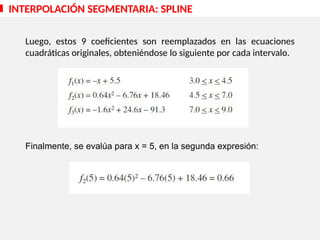
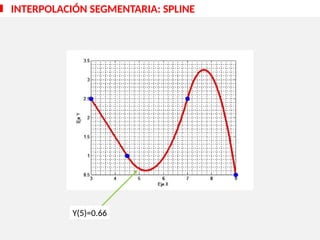
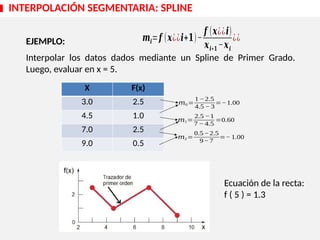
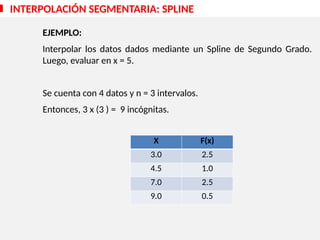
![EJEMPLO:
Interpolar los datos usando un Spline cúbico. Luego, evaluar en x = 5.
>> x = [ 3 4.5 7 9 ];
>> y = [ 2.5 1 2.5 0.5 ];
>> XX = 3 : 0.1 : 9;
>> YY = spline( x , y , XX );
>> plot(x,y,'o',XX,YY)
>> Xo = 5;
>> Yo = spline( x , y , Xo )
Yo =1.1519
INTERPOLACIÓN SEGMENTARIA: SPLINE](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-50-320.jpg)
![INTERPOLACIÓN SEGMENTARIA: SPLINE
M=[3 2.5;4.5 1;7 2.5;9 0.5]; a=5;
function [fa]=spline_cubico(M,a)
%spline_cubico calcula interpolación usando splines
%cúbicos
x=M(:,1);y=M(:,2);%separo la primera y segunda columna
fa=spline(x,y,a);%trazadores cúbicos
figure(1),clf
x1=linspace(x(1),x(end),500);
fx1=spline(x,y,x1);%calcula trazadores unicamente
cúbicos
hold on
plot(x,y,'ro','LineWidth',3)
plot(x1,fx1,'b','LineWidth',2)
plot(a,fa,'ko','LineWidth',3)
stem(x,y,'r','LineWidth',2)
hold off
grid minor
end](https://image.slidesharecdn.com/ci708unidad5aproximacionfunciones20220221-241026123816-7e64ba13/85/Aproximacion-de-funciones-Analisis-numerico-UPC-51-320.jpg)