Pasos - Programade elementos finitos
1. Modelo geométrico
• Ubicación y numeración de
nodos
• Numeración de elementos y
conectividad
2. Seleccionar tipo de análisis
3. Propiedades de los elementos
-> Áreas
4. Escoger material
5. Condiciones de frontera de
desplazamiento
6. Aplicar carga
7. Chequear (opcional)
8. Realizar análisis
• Inicializar
• Ensamblamos matriz rigidez
global
• Partir el sistema
• Encontrar desplazamientos
nodos libres
• Encontrar reacciones
9. Post-procesamiento
• Fuerzas internas
• Esfuerzos
• Gráficos
3.
• E=1.2x106
[psi] forall
elements.
• Load of 1000 lb is applied
at node 1 in the negative z
direction.
• Nodes 2–4 are supported
by ball-and-socket joints
and thus constrained from
movement in the x, y, and z
directions.
• Node 1 is constrained from
movement in the y direction
by the roller shown
Ejemplo armadura espacial
4.
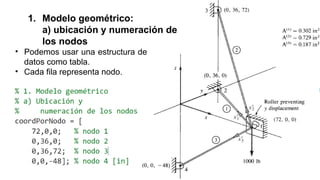
1. Modelo geométrico:
a)ubicación y numeración de
los nodos
• Podemos usar una estructura de
datos como tabla.
• Cada fila representa nodo.
5.
1. Modelo geomético:
b)numeración de los
elementos y conectividad
• Podemos usar una estructura de
datos como tabla.
• Cada fila representa elemento.
6.
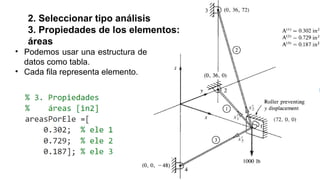
2. Seleccionar tipoanálisis
3. Propiedades de los elementos:
áreas
• Podemos usar una estructura de
datos como tabla.
• Cada fila representa elemento.
7.
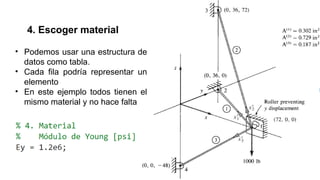
4. Escoger material
•Podemos usar una estructura de
datos como tabla.
• Cada fila podría representar un
elemento
• En este ejemplo todos tienen el
mismo material y no hace falta
8.
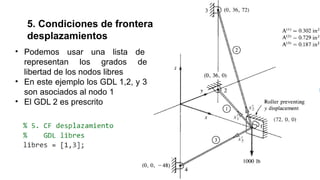
5. Condiciones defrontera
desplazamientos
• Podemos usar una lista de
representan los grados de
libertad de los nodos libres
• En este ejemplo los GDL 1,2, y 3
son asociados al nodo 1
• El GDL 2 es prescrito
9.
6. Aplicar carga
•Podemos usar una lista de GDL
donde están aplicados la carga
• Debemos tener otra lista con los
valores de las cargas asociadas
a esos nodos
10.
7. Chequear
8. Análisisa) Inicializamos
• Estos pasos pueden ser
automáticos
• Podemos saber el número de
elementos, nodos, grados de
libertad de todo el sistema
• Inicializamos con cero los
vectores de desplazamiento,
carga, y matriz de rigidez con los
tamaños apropiados
• Llenamos las cargas
11.
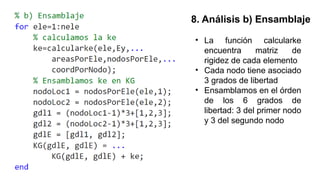
8. Análisis b)Ensamblaje
• La función calcularke
encuentra matriz de
rigidez de cada elemento
• Cada nodo tiene asociado
3 grados de libertad
• Ensamblamos en el órden
de los 6 grados de
libertad: 3 del primer nodo
y 3 del segundo nodo
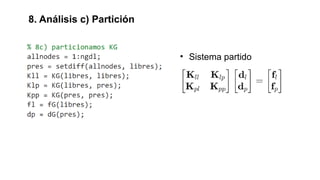
8. Análisis c)Particición
• El sistema original tiene la forma [KG] {dG} = {fG}
o donde [KG] es la matriz de rigidez global de tamaño ngdl x
ngdl
o {dG} es el vector de desplazamientos nodales.
o {fG} es el vector de fuerzas nodales aplicadas.
Clasificación en GDL Libres y Prescritos
Los grados de libertad del sistema se dividen en dos categorías:
• Grados de libertad libres (libres): desplazamientos que no están
restringidos, y pueden moverse debido a las cargas aplicadas.
• Grados de libertad prescritos (prescrito): fijos o restringidos (por
ejemplo, en los apoyos) y tienen un desplazamiento conocido
(generalmente 0).
14.
8. Análisis c)Particición
• Una vez identificados los grados de libertad libres y prescritos, la
matriz de rigidez global, el vector de desplazamientos, y el
vector de fuerzas se reorganizan de acuerdo con esta
clasificación.
• Esto lleva a una partición del sistema de ecuaciones:
• El objetivo principal es resolver el sistema para [dl] , es decir,
encontrar los desplazamientos en los grados de libertad libres.
• [dp] son conocidos
• [fl] son conocidos, mientras [fp] son las reacciones
15.
8. Análisis c)Partición
• Sistema reducido
• Sólo involucra los desplazamientos libres que son los desconocidos
• Reacciones
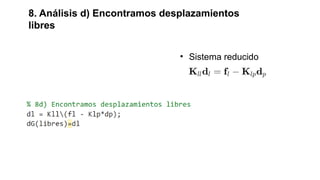
8. Análisis d)Encontramos desplazamientos
libres
• Sistema reducido
18.
8. Análisis e)Encontramos reacciones en nodos
prescritos
• Reacciones
19.
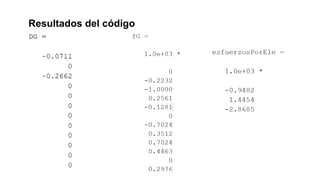
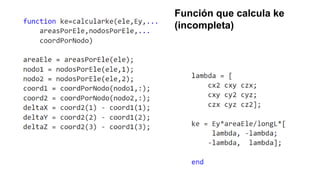
9. Posprocesamiento b)Esfuerzos por elemento
• La función
calcularEsfuerzo
encuentra el esfuerzo
de cada elemento y
luego llenamos un
vector con esos
valores
![• E=1.2x106
[psi] for all
elements.
• Load of 1000 lb is applied
at node 1 in the negative z
direction.
• Nodes 2–4 are supported
by ball-and-socket joints
and thus constrained from
movement in the x, y, and z
directions.
• Node 1 is constrained from
movement in the y direction
by the roller shown
Ejemplo armadura espacial](https://image.slidesharecdn.com/armaduras3dprograma-251213050117-49f558d0/85/Armaduras3DPrograma-de-Ingenieria-Mecanica-3-320.jpg)



![8. Análisis c) Particición
• El sistema original tiene la forma [KG] {dG} = {fG}
o donde [KG] es la matriz de rigidez global de tamaño ngdl x
ngdl
o {dG} es el vector de desplazamientos nodales.
o {fG} es el vector de fuerzas nodales aplicadas.
Clasificación en GDL Libres y Prescritos
Los grados de libertad del sistema se dividen en dos categorías:
• Grados de libertad libres (libres): desplazamientos que no están
restringidos, y pueden moverse debido a las cargas aplicadas.
• Grados de libertad prescritos (prescrito): fijos o restringidos (por
ejemplo, en los apoyos) y tienen un desplazamiento conocido
(generalmente 0).](https://image.slidesharecdn.com/armaduras3dprograma-251213050117-49f558d0/85/Armaduras3DPrograma-de-Ingenieria-Mecanica-13-320.jpg)
![8. Análisis c) Particición
• Una vez identificados los grados de libertad libres y prescritos, la
matriz de rigidez global, el vector de desplazamientos, y el
vector de fuerzas se reorganizan de acuerdo con esta
clasificación.
• Esto lleva a una partición del sistema de ecuaciones:
• El objetivo principal es resolver el sistema para [dl] , es decir,
encontrar los desplazamientos en los grados de libertad libres.
• [dp] son conocidos
• [fl] son conocidos, mientras [fp] son las reacciones](https://image.slidesharecdn.com/armaduras3dprograma-251213050117-49f558d0/85/Armaduras3DPrograma-de-Ingenieria-Mecanica-14-320.jpg)