Este documento resume un artículo científico sobre el diseño e implementación de controladores para un sistema de bola y barra. El objetivo del trabajo fue identificar las variables del sistema, definir su modelo matemático, y diseñar controladores PID y LQR óptimo. Se encontró que el controlador LQR tuvo mejor desempeño que el PID al estabilizar la posición de la bola, requiriendo menos tiempo y error. El modelo matemático experimental definido no logró describir adecuadamente el sistema físico.


![implantados en un sistema microprocesado. Consecuentemente, se evaluaron dichas
configuraciones de control respectivas.
RESULTADOS
La presentación de resultados de la investigación está ordenada según los objetivos
específicos de ésta, mencionados anteriormente en el resumen. Primeramente, debe
referirse a la identificación de las variables del sistema.
Se presenta a continuación una tabla que describe las variables que interactúan en el
sistema físico, así como las unidades utilizadas para cuantificarlas:
Tabla 1.1. Variables del sistema bola y barra.
Variable Descripción Unidad
Variables manipuladas xref Posición de referencia Metros [m]
Variables controladas
θ
Ángulo de la barra con
respecto al eje
horizontal
Grados [°]
x
Posición de la bola en
la barra
Metros [m]
Perturbaciones
Fr
Fuerza externa
aplicada sobre la masa
esférica
Newton [N]
∆V
Fluctuaciones de
voltaje
Voltios [V]
Puede apreciarse en la tabla las variables manipuladas, controladas, y las perturbaciones,
respectivamente, las cuales dan forma a la descripción del sistema físico que conllevó a la
posterior definición del modelo matemático: segundo objetivo específico del trabajo de
investigación.](https://image.slidesharecdn.com/0c52bbfb-a192-4ed9-9a27-fb590061edd4-161220222605/85/Articulo-Cientifico-4-320.jpg)


![De manera que se recurrió al proceso iterativo. En la siguiente tabla se aprecia los
parámetros obtenidos a partir de la regla de Bryson así como la séptima iteración, en la cual
se consiguió un control sin error de estado estable y tiempo de estabilización aceptable:
Tabla 1.3. Comparación de la respuesta del sistema con los parámetros de la regla de Bryson y de la
última iteración.
Iteración Matriz K r1 q1 q2 Amplitud
Tiempo de
asentamiento
Bryson [16.96 30.1511] 0.0044 1 4 0.2 1.52seg
Iteración#7 [3.6013 6.0302] 0.11 0.1 4 1.01 1.25seg
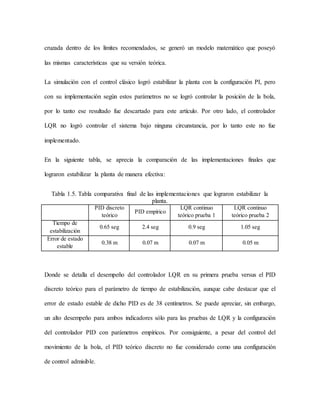
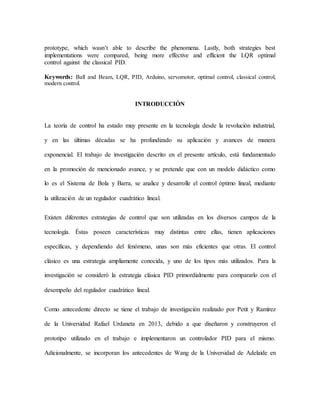
En la siguiente figura es posible comparar las respuestas de salida a nivel de simulación
con la regla de Bryson versus la iteración 7:
Figura 1.5. Comparación entre la respuesta de salida con parámetros de Bryson (izq.) y parámetros
empíricos de la séptima iteración (der.) con el controlador LQR.
La aplicación del controlador LQR para la versión discreta del modelo no logró estabilizar
el sistema bajo ninguna circunstancia, y por consiguiente los resultados no son incluidos.](https://image.slidesharecdn.com/0c52bbfb-a192-4ed9-9a27-fb590061edd4-161220222605/85/Articulo-Cientifico-8-320.jpg)

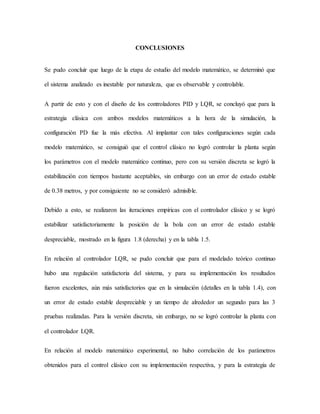
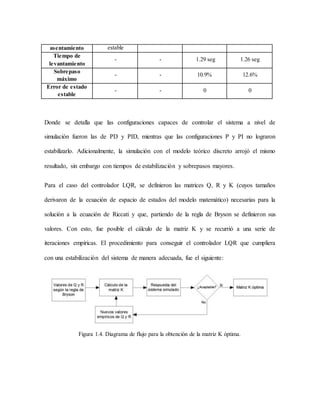
![Según el modelo discreto, por otro lado, se logró una estabilización del movimiento de la
bola, pero con error de estado estable. La siguiente gráfica demuestra la comparación entre
tal implantación (izquierda) versus la implantación PID posteriormente realizada con
parámetros hallados empíricamente:
Figura 1.8. Comparación de respuestas (3 pruebas) de la configuración PD según el modelo discreto
teórico (izq.) y parámetros del PID hallados empíricamente (der.).
Puede detallarse la disminución del error de estado estable para el controlador empírico,
luego de habérsele aplicado una perturbación para las 3 pruebas mostradas.
La implementación del controlador LQR según el modelo continuo teórico, por otro lado,
arrojó los siguientes resultados:
Tabla 1.4. Comparación entre la simulación del modelo continuo teórico con el controlador LQR y
su implementación.
Simulación LQR
(figura 4.25)
Implantación LQR (p. 1) Implantación LQR (p. 2)
Matriz K [3.6013 6.0302]
Tiempo de 1.25 seg 0.9 seg 1.05 seg](https://image.slidesharecdn.com/0c52bbfb-a192-4ed9-9a27-fb590061edd4-161220222605/85/Articulo-Cientifico-10-320.jpg)