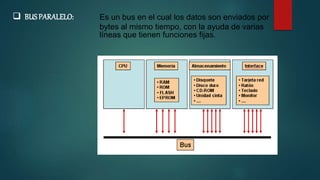
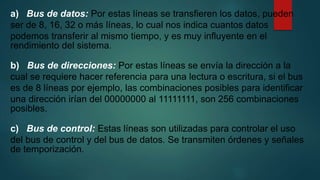
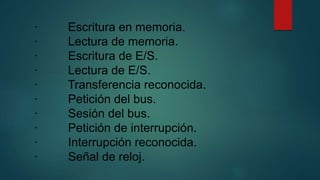
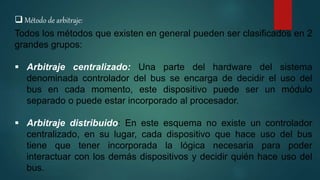
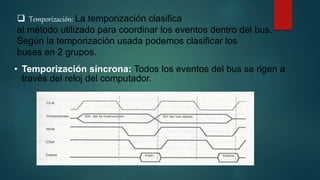
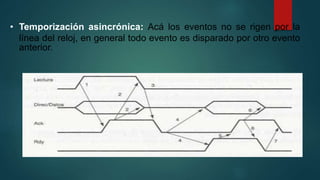
Este documento describe los diferentes tipos de buses de datos, incluyendo buses paralelos y seriales. Explica que los buses permiten la conexión lógica entre subsistemas de un sistema digital, enviando datos entre dispositivos. Describe los componentes clave de un bus, como las líneas de dirección, control y datos. También cubre temas como los métodos de arbitraje de buses y la temporización síncrona y asincrónica.