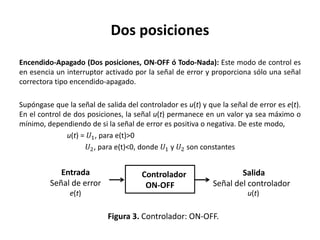
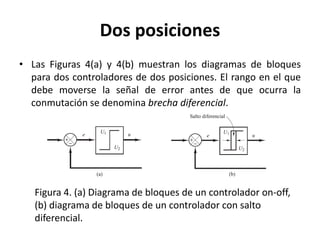
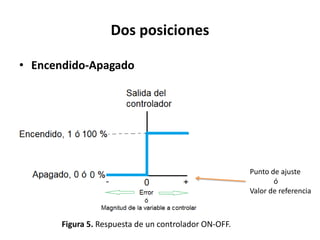
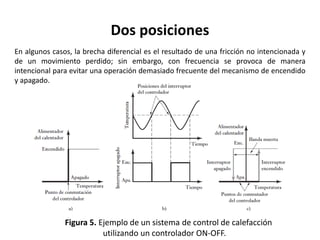
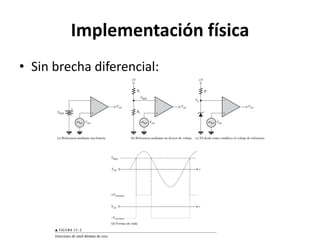
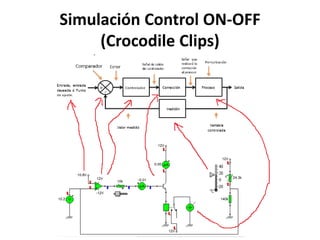
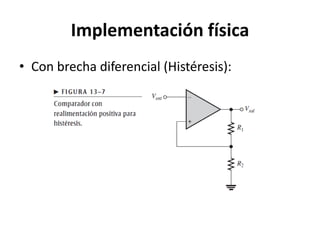
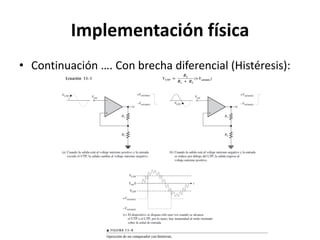
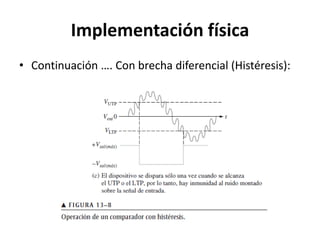
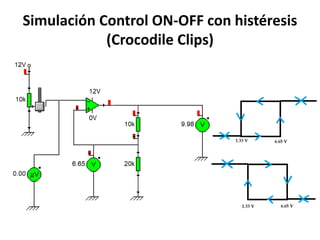
Este documento describe el controlador de dos posiciones o encendido-apagado, el cual proporciona una señal de salida de solo dos valores posibles. Explica cómo este tipo de controlador funciona y cómo se implementa físicamente, incluyendo ejemplos de su uso para controlar la temperatura de una habitación y el nivel de agua en un tanque. También cubre conceptos como la brecha diferencial y cómo simular este modo de control con Crocodile Clips o un microcontrolador.