Descargar como PPSX, PPTX

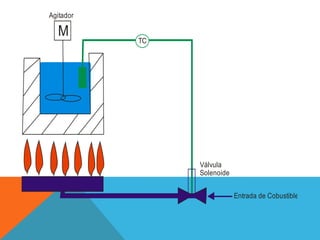
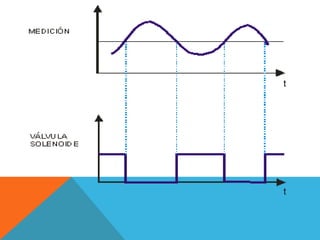
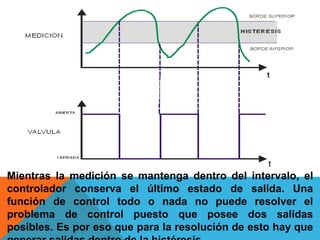
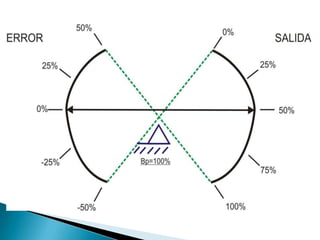
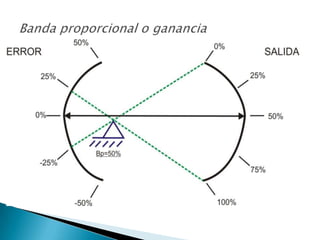
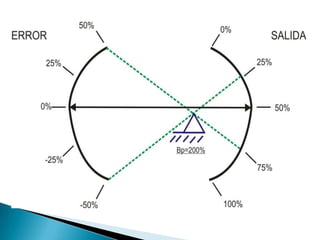
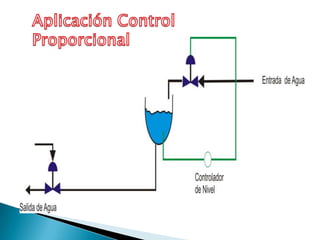
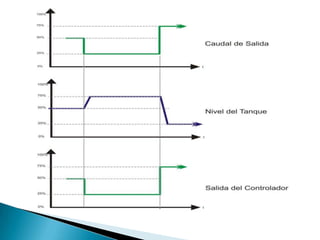

Este documento describe cuatro modos de control: todo o nada, proporcional, integral y derivativo. El modo todo o nada tiene solo dos posiciones posibles (100% o 0%) y considera solo el signo del error. El modo proporcional vincula la variación de la salida con la variación del error de forma proporcional. La ganancia define la variación de la salida en respuesta a una variación del error. El modo integral considera la acumulación del error con el tiempo, mientras que el modo derivativo considera la tasa de cambio del error.