Descargar como PDF, PPTX

![21
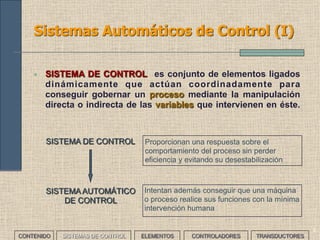
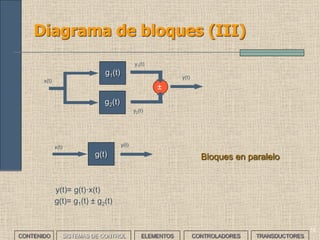
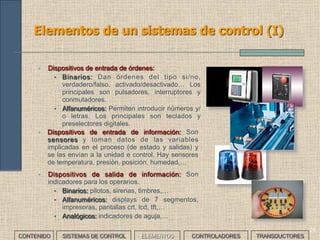
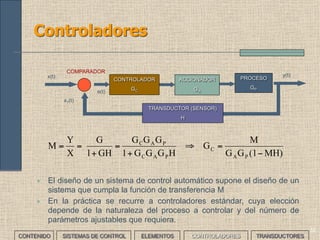
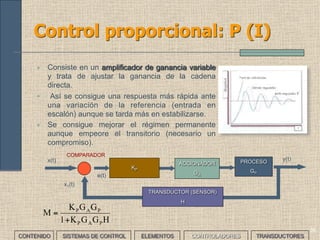
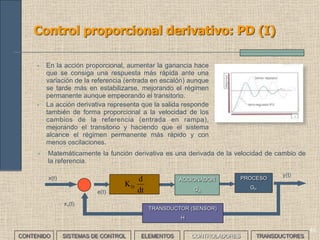
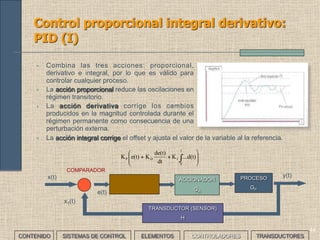
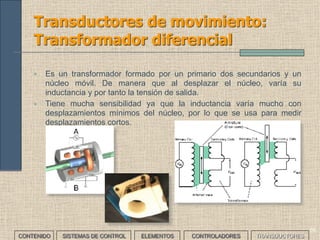
Algebra de diagramas de bloques (II)
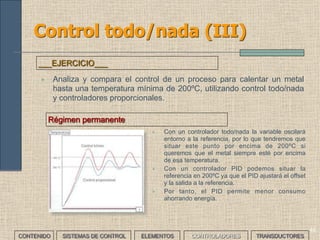
Transposición de un punto de suma
CONTENIDO SISTEMAS DE CONTROL ELEMENTOS TRANSDUCTORESCONTROLADORES
G(s) [E1(s)+E2(s)]
G(s) [E1(s)+E2(s)]
G(s)E1(s)+E2(s) G(s)E1(s)+E2(s)](https://image.slidesharecdn.com/sistemasautomaticos-120416132021-phpapp02/85/Sistemas-automaticos-27-320.jpg)
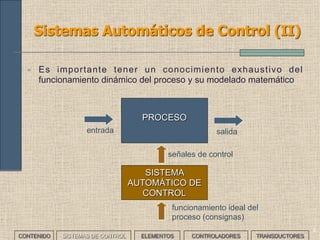
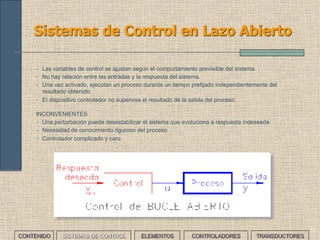
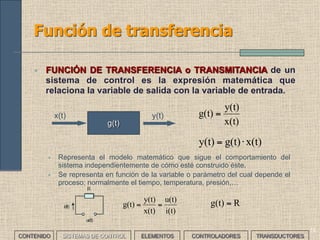
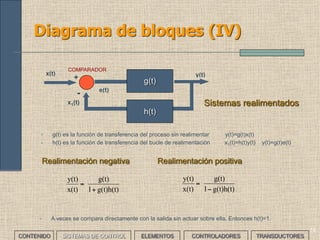
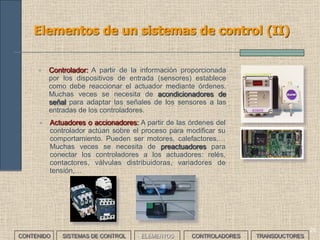
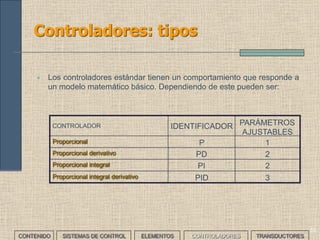
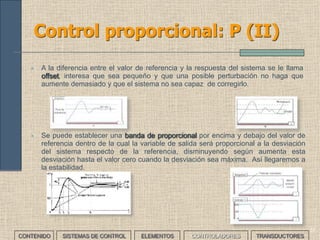
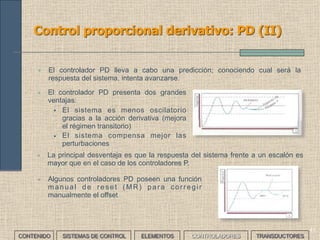
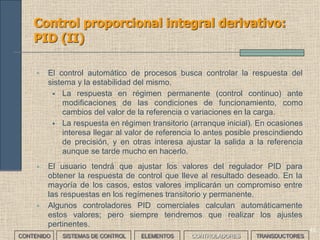
![Algebra de diagramas de bloques (IV)
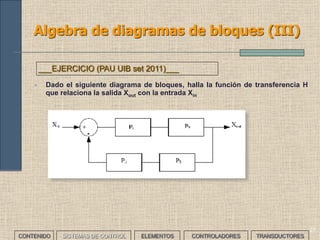
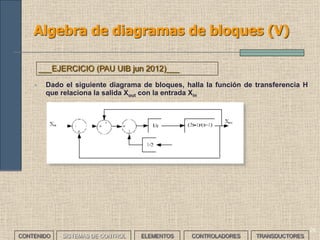
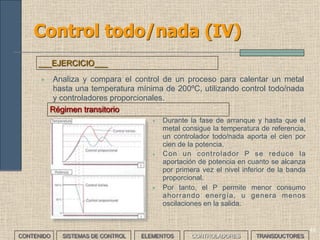
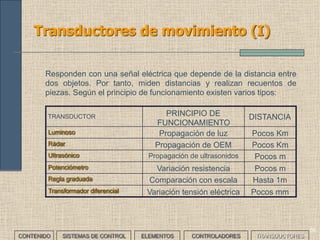
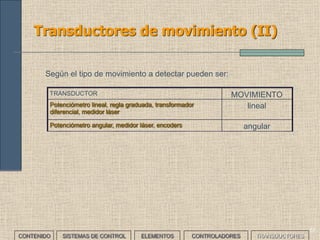
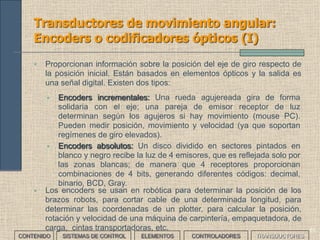
• Dado el siguiente diagrama de bloques, halla la función de transferencia H
que relaciona la salida Xout con la entrada Xin
x1(t)= xin(t)·[ 1+ P1]
xout(t)= xin(t)·P3 - xin(t) ·[ 1+ P1] P2
xout(t)= xin(t)·P3 – x1(t) · P2
xout(t)= xin(t)·[P3 – P2 (1+ P1 )]
H = P3 - P2 (1+ P1)
___EJERCICIO (PAU UIB set 2010) ___
25
CONTENIDO SISTEMAS DE CONTROL ELEMENTOS TRANSDUCTORESCONTROLADORES
x1(t)](https://image.slidesharecdn.com/sistemasautomaticos-120416132021-phpapp02/85/Sistemas-automaticos-29-320.jpg)





![69
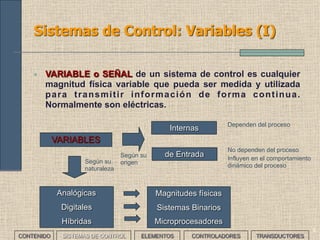
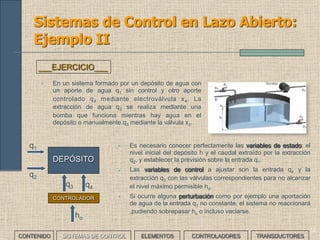
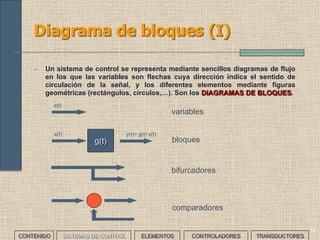
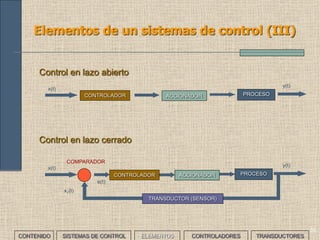
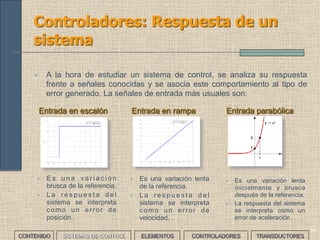
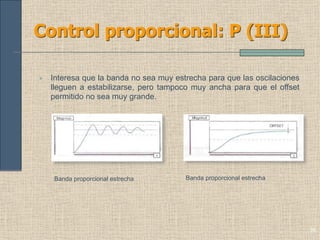
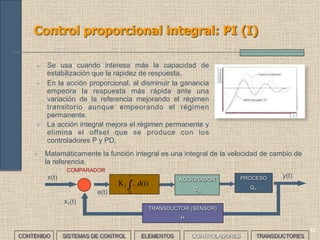
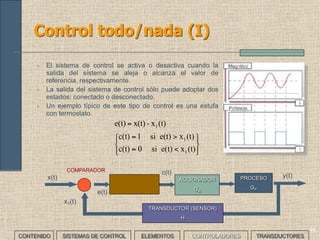
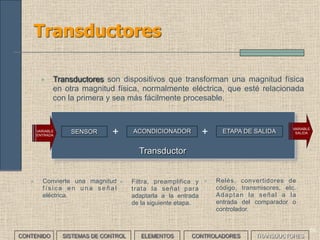
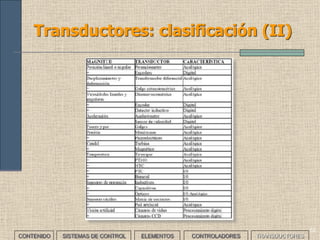
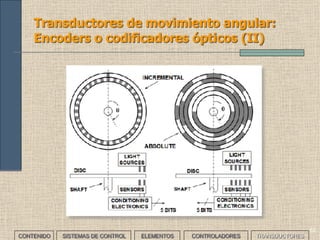
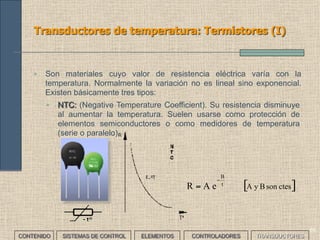
Transductores de temperatura: Termistores (I)
CONTENIDO SISTEMAS DE CONTROL ELEMENTOS TRANSDUCTORESCONTROLADORES
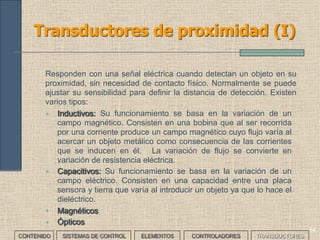
• Son materiales cuyo valor de resistencia eléctrica varía con la
temperatura. Normalmente la variación no es lineal sino exponencial.
Existen básicamente tres tipos:
• NTC: (Negative Temperature Coefficient). Su resistencia disminuye
al aumentar la temperatura. Suelen usarse como protección de
elementos semiconductores o como medidores de temperatura
(serie o paralelo).
[ ]ctessonByAt
B
eAR
−
=](https://image.slidesharecdn.com/sistemasautomaticos-120416132021-phpapp02/85/Sistemas-automaticos-77-320.jpg)

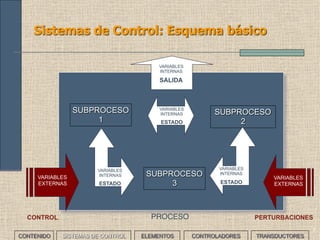
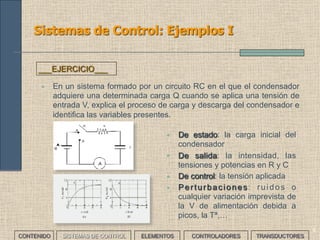
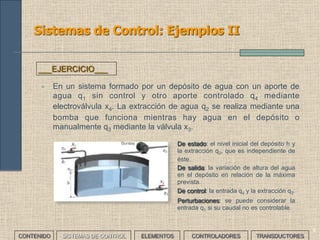
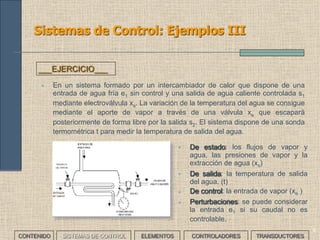
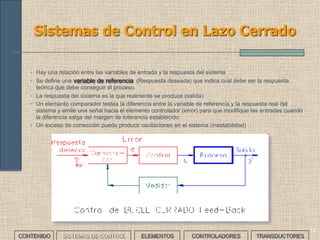
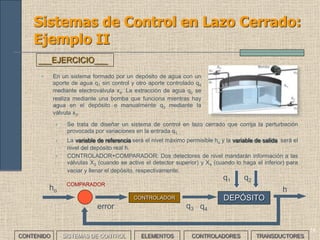
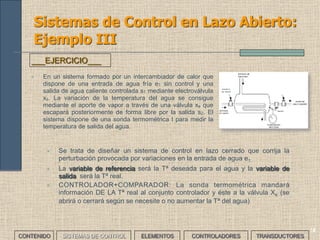
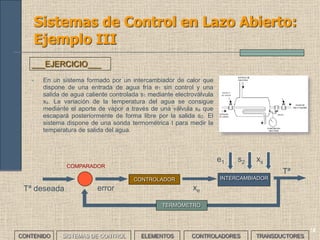
Este documento presenta una introducción a los sistemas automáticos de control. Explica conceptos clave como lazo abierto y lazo cerrado, variables de estado, entrada, salida y control, y provee ejemplos de sistemas de control en diferentes contextos como un depósito de agua y un intercambiador de calor. Además, describe los componentes típicos de un sistema de control como comparadores, reguladores, transductores y actuadores.