Descargado 94 veces

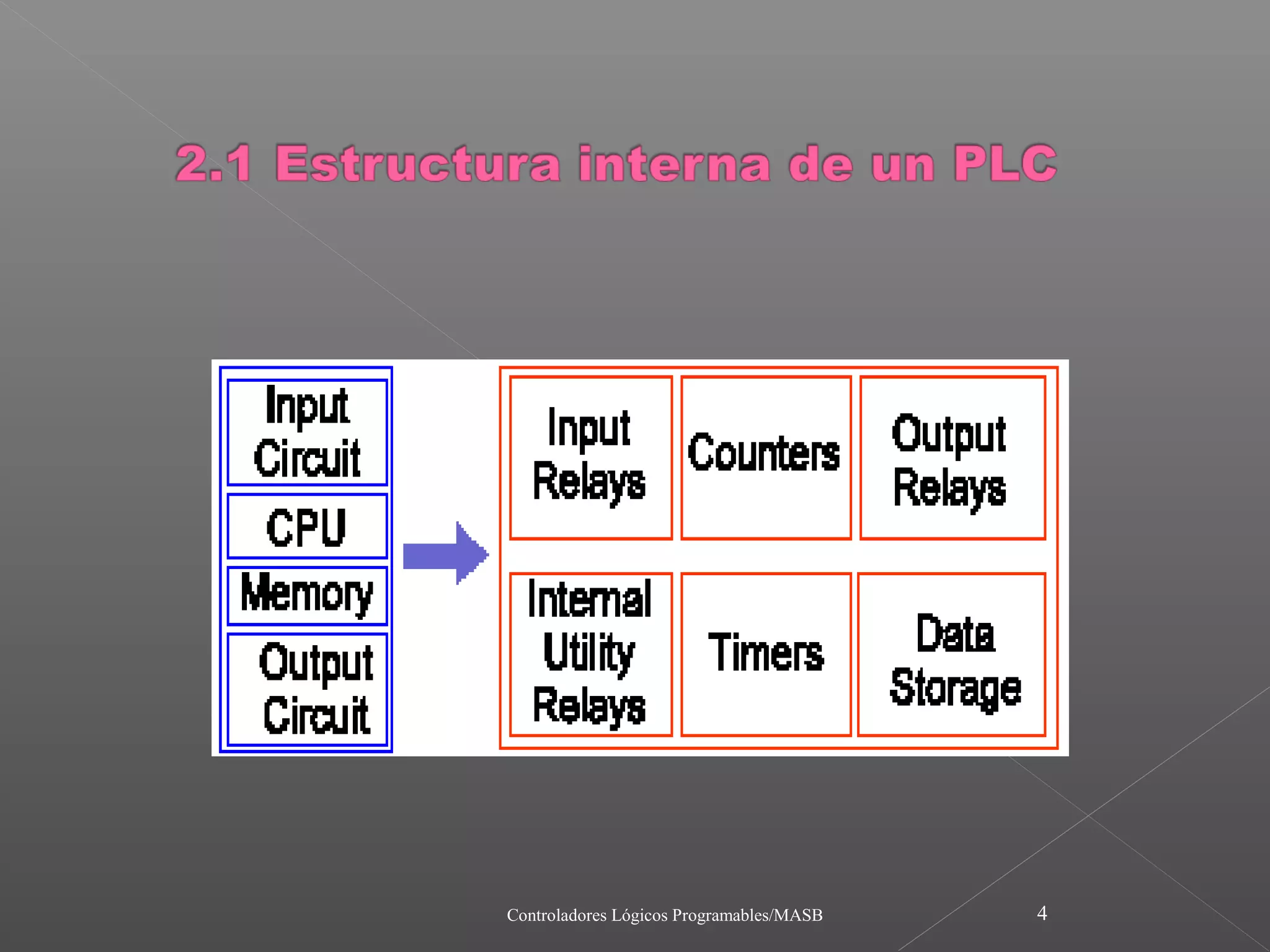

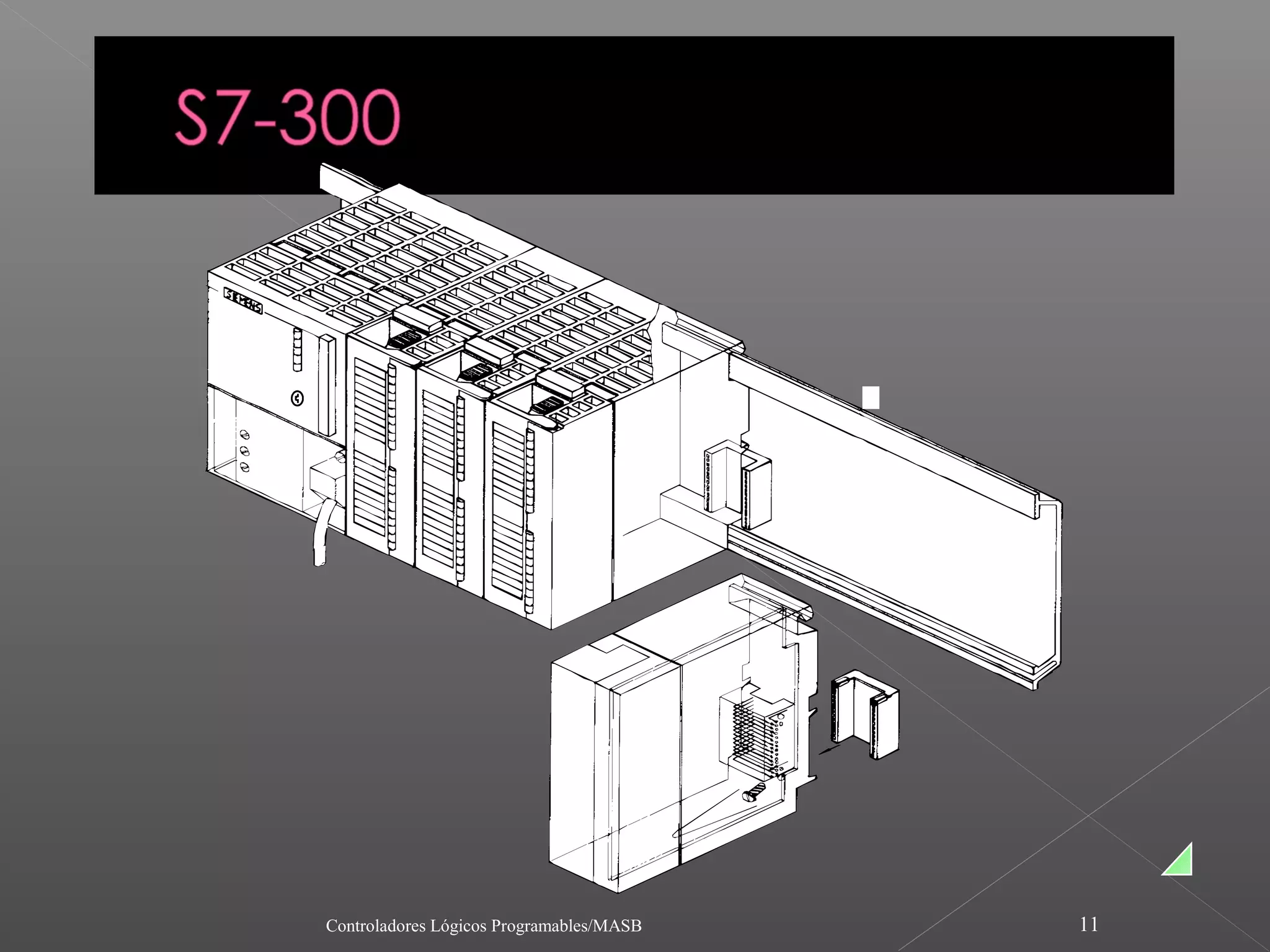
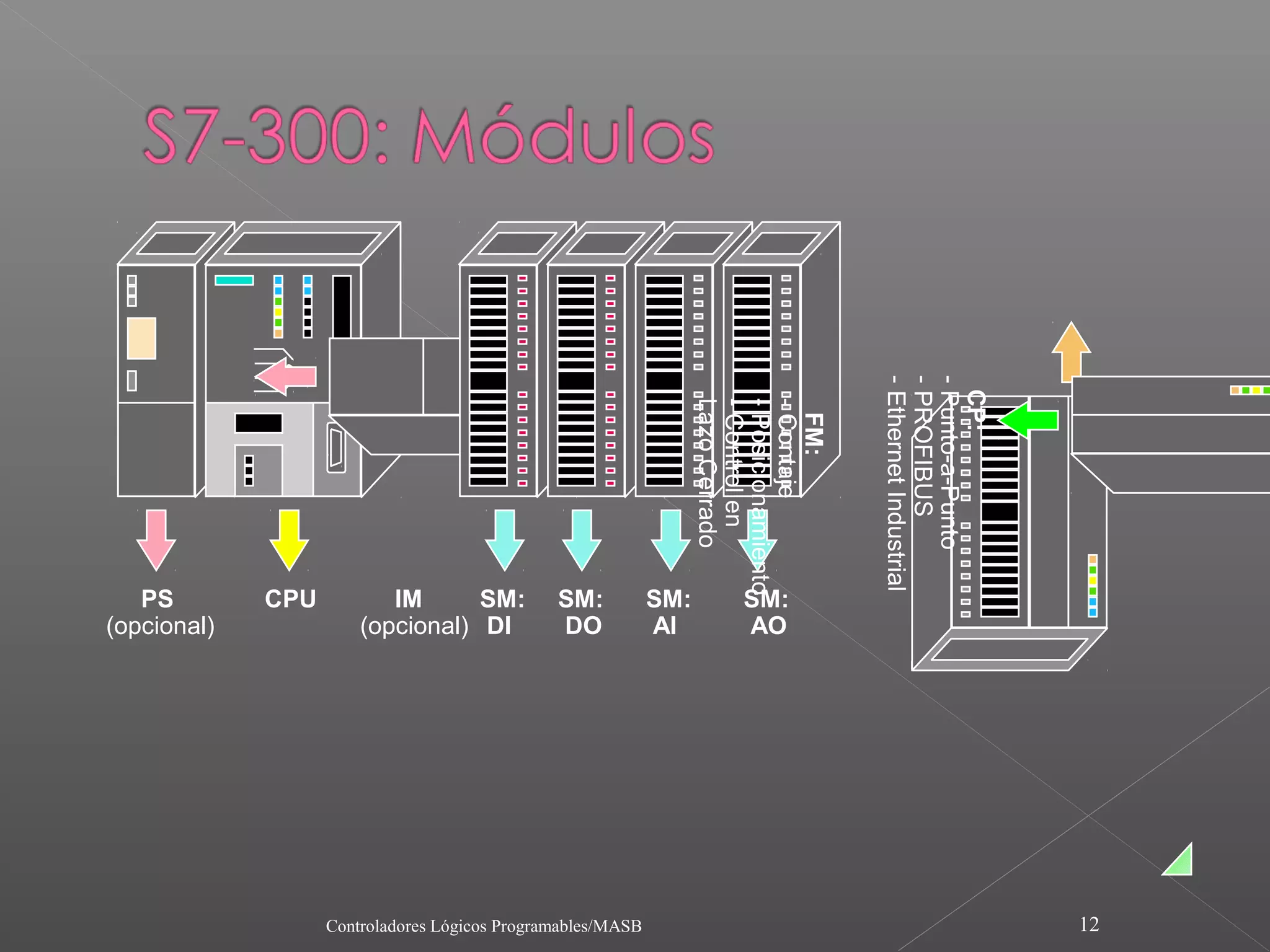


Un PLC es un controlador electrónico programable basado en un microprocesador. Se compone de una unidad central de proceso, módulos de memoria, interfaces de entrada y salida, y fuente de alimentación. El PLC recibe señales de entrada de sensores, ejecuta un programa de control almacenado para gobernar las señales de salida a actuadores según el estado de las entradas.













































