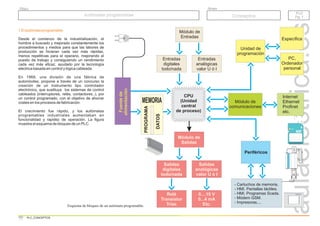
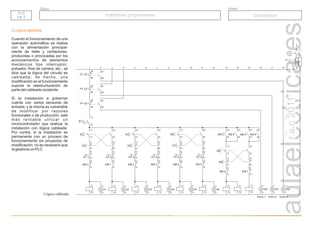
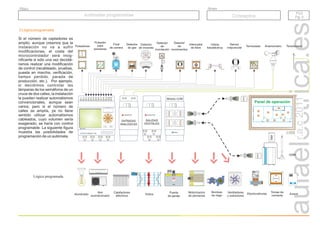
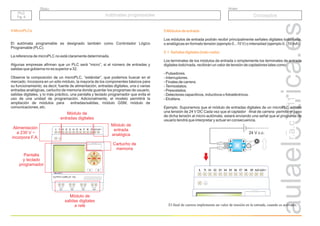
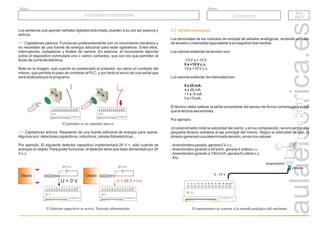
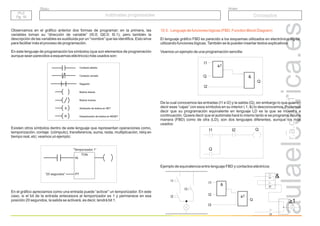
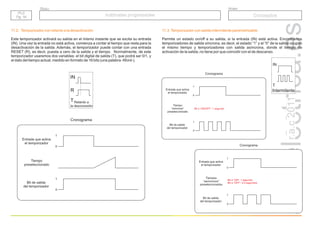
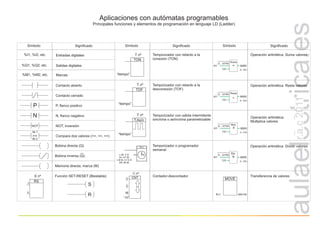
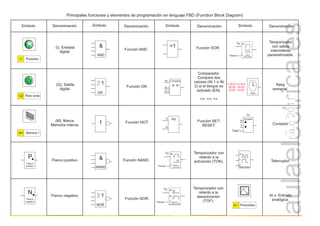
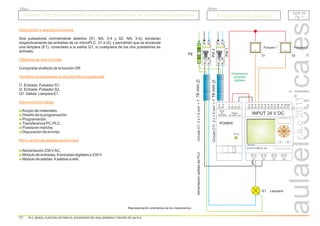
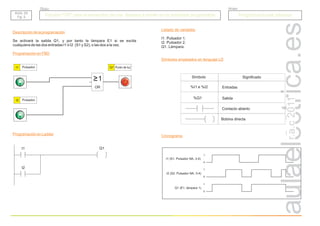
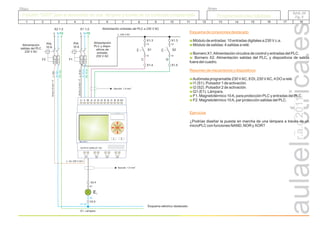
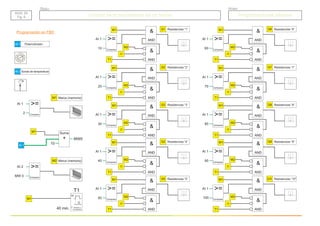
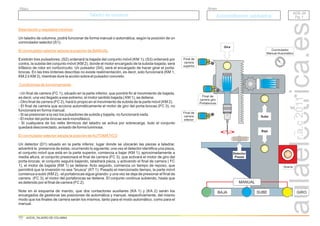
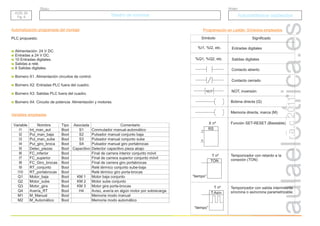
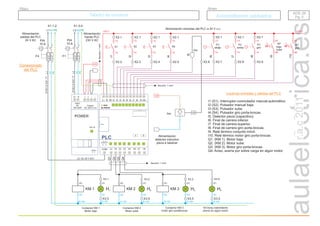
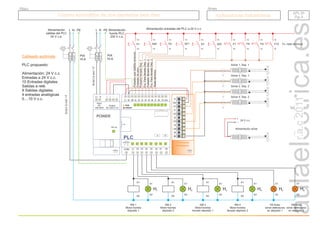
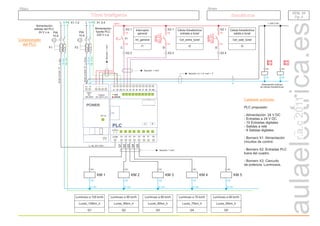
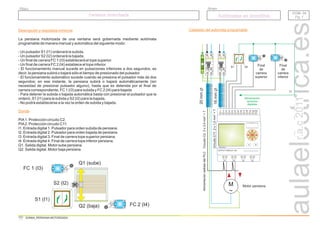
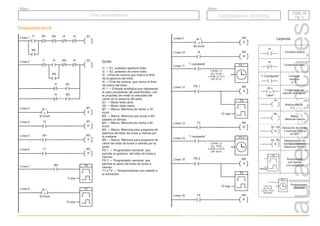
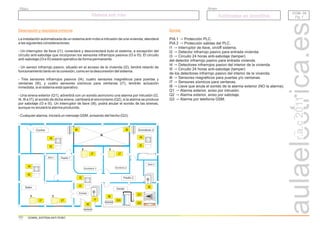
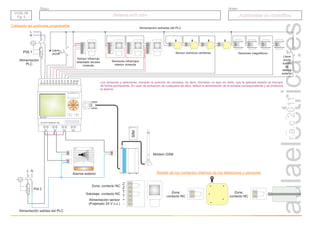
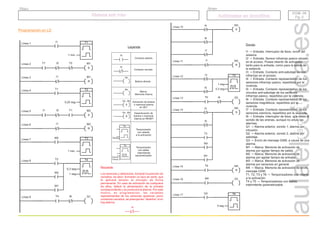
Este documento proporciona información sobre autómatas programables. Explica conceptos como lógica cableada vs lógica programada, y describe los componentes básicos de un autómata programable como módulos de entrada, salida, memoria, unidad central de proceso y unidad de programación. También cubre el uso de microPLCs y diferentes tipos de señales de entrada como digitales y analógicas.