Descargado 15 veces











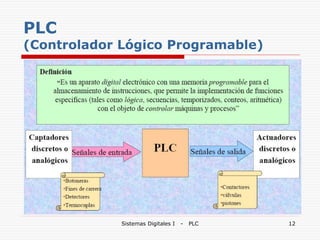










































El documento proporciona información sobre controladores lógicos programables (PLC). Explica que un PLC es un dispositivo electrónico programable que usa instrucciones almacenadas en memoria para controlar máquinas y procesos industriales en tiempo real. Describe los componentes clave de un PLC como la unidad central de procesamiento (CPU), módulos de entrada/salida, memorias y lenguajes de programación. También cubre aplicaciones comunes, ventajas y desventajas de los PLC.

































![PLC[1].ppt](https://cdn.slidesharecdn.com/ss_thumbnails/plc1-230531071451-7fe27fb9-thumbnail.jpg?width=640&height=640&fit=bounds)
































