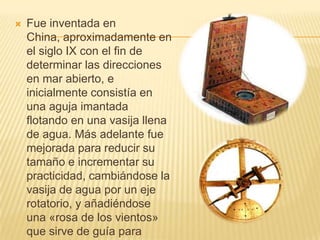
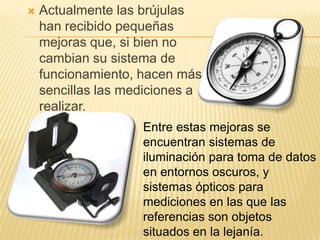
La brújula fue inventada en China en el siglo IX y consistía originalmente en una aguja imantada flotando en agua para determinar direcciones en el mar. Más tarde fue mejorada al reemplazar la vasija de agua con un eje rotatorio y agregar una rosa de los vientos para guiar las mediciones. Aunque las brújulas modernas han recibido pequeñas mejoras para facilitar las mediciones en entornos oscuros o a distancia, su principio básico de funcionamiento sigue sin cambios.