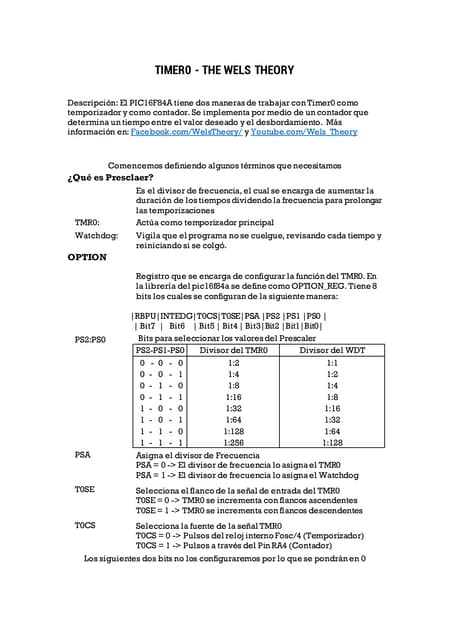
El documento describe las características generales de los microcontroladores y del microcontrolador PIC16F84 en particular. Explica que los microcontroladores tienen CPU, memoria (ROM, RAM), reloj, periféricos de E/S y protecciones. Luego se enfoca en el PIC16F84, describiendo su arquitectura Harvard, juego de instrucciones RISC de 14 bits, puertos E/S y temporizador TMR0.