Descargar como PDF, PPTX
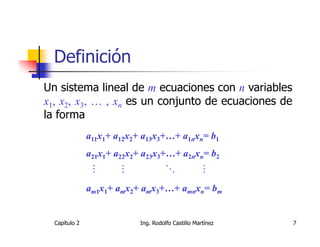
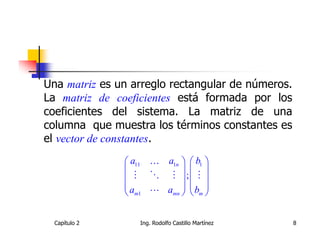
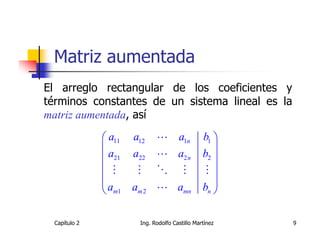
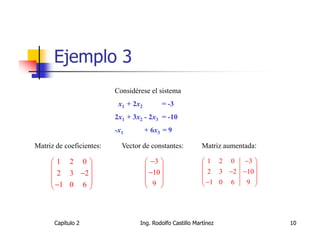
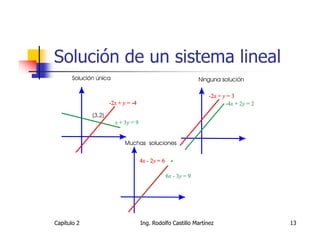
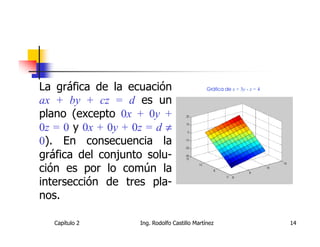
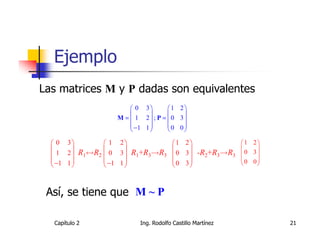
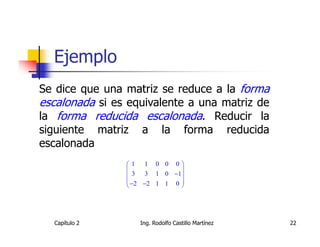
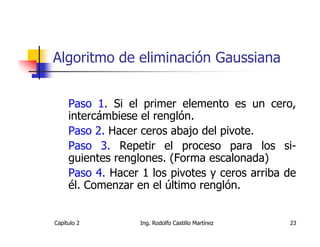
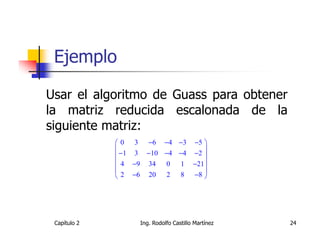
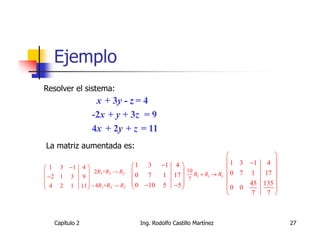
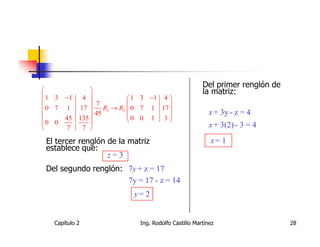



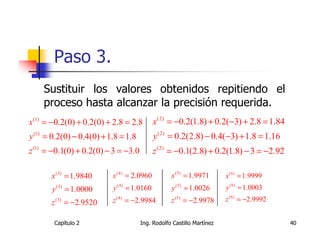
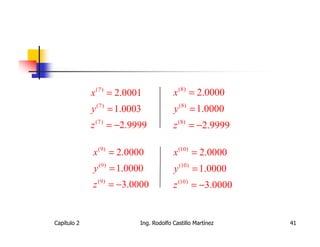
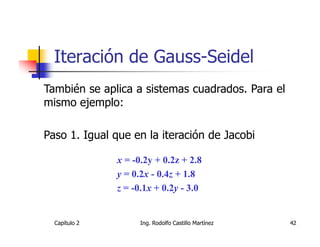
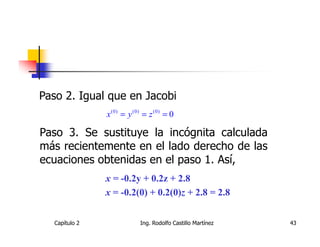

El documento presenta un resumen de los conceptos fundamentales de álgebra lineal, incluyendo sistemas lineales, vectores, matrices y su aplicación para resolver sistemas de ecuaciones lineales a través del método de eliminación de Gauss. Se definen conceptos como sistemas lineales, matrices de coeficientes, vectores de constantes, matrices aumentadas y formas escalonada y reducida escalonada. También se explica el proceso de eliminación de Gauss para reducir una matriz a su forma escalonada y así resolver sistemas de ecuaciones lineales.










































