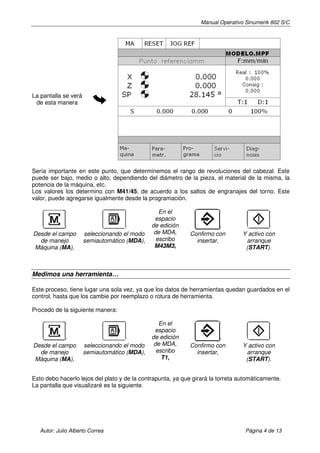
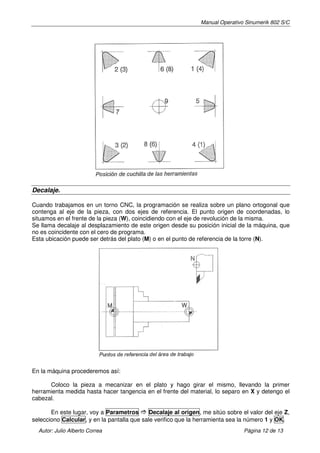
Este documento proporciona instrucciones para operar y programar un torno CNC con control Sinumerik 802 S/C. Explica cómo encender la máquina y el control, referenciar el torno, medir y almacenar datos de herramientas, establecer el decalaje de origen, y realizar la programación CNC antes del mecanizado. El objetivo es ofrecer una guía básica para usuarios iniciales sobre los pasos iniciales de puesta en marcha y configuración del sistema.



































![Curso basico torno cnc leadwell[2]](https://cdn.slidesharecdn.com/ss_thumbnails/cursobasicotornocncleadwell2-130226100755-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






































