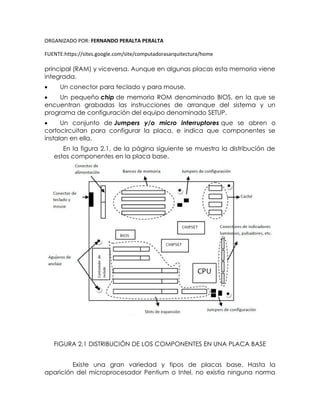
Este documento presenta una introducción a la arquitectura de computadoras. Explica los componentes básicos de una computadora como el procesador, memoria, dispositivos de entrada/salida y software. Describe la arquitectura clásica de Von Neumann, incluyendo la unidad central de procesamiento, memoria, entrada/salida y buses de interconexión. Finalmente, detalla la estructura interna de la CPU y sus unidades de control y aritmético lógica.
















































































![ORGANIZADO POR: FERNANDO PERALTA PERALTA
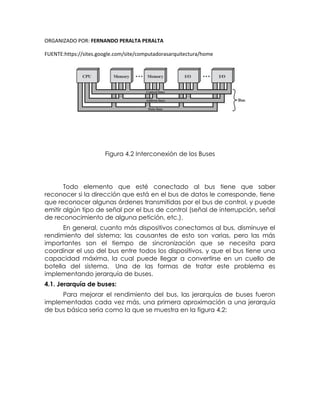
FUENTE:https://sites.google.com/site/computadorasarquitectura/home
FIGURA 6.2. DISCO DURO
También existe otro tipo de discos denominados de estado
sólido que utilizan cierto tipo de memorias construidas
consemiconductores para almacenar la información. El uso de esta clase
de discos generalmente se limitaba a las supercomputadoras, por su
elevado precio, aunque hoy en día ya se puede encontrar en el mercado
unidades mucho más económicas de baja capacidad (hasta 512[1] GB)
para el uso en computadoras personales (sobre todo portátiles). Así,
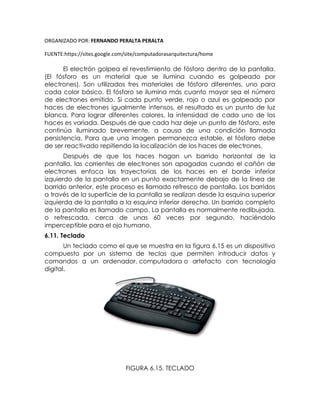
el caché de pista es una memoria de estado sólido, tipo memoria RAM,
dentro de un disco duro de estado sólido.
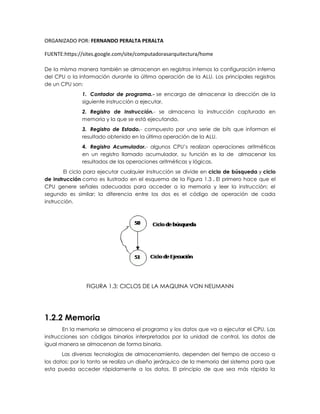
6.2.1. Direccionamiento
Como mostramos en figura 6.3 nos muestra el cilindro la pista y los
sectores del disco duro, asi mismo en la figura 6.4. muestra como el disco
duro es dividido en sectores.](https://image.slidesharecdn.com/manualparaarquitecturadepc-151116200304-lva1-app6891/85/Manual-para-arquitectura-de-pc-121-320.jpg)