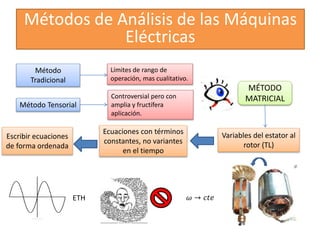
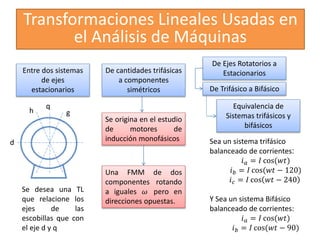
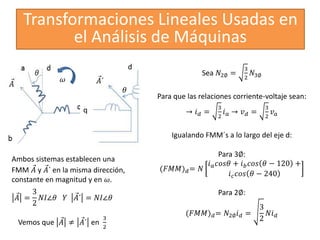
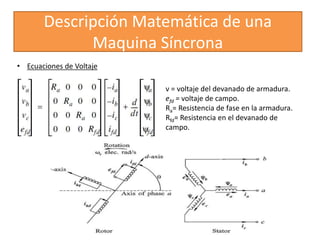
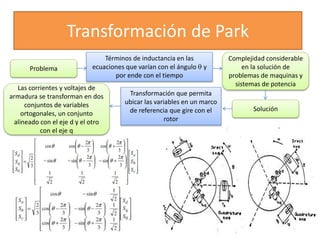
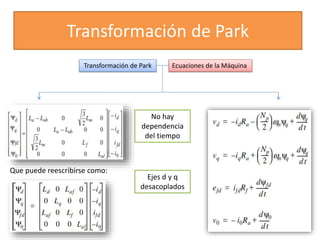
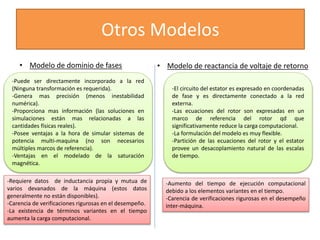
Este documento describe diferentes modelos matemáticos y transformaciones lineales utilizadas para el análisis de máquinas eléctricas. Explica la transformación de Park, la cual permite reescribir las ecuaciones de una máquina síncrona sin dependencia del tiempo al transformar las variables de corriente y voltaje del estator a un marco de referencia giratorio. También cubre otros modelos como el de dominio de fases y el de reactancia de voltaje de retorno.