
Recomendados
Más contenido relacionado
Similar a MÁQUINASINCRÓNICA-Presentaciónsssssss.pdf
Similar a MÁQUINASINCRÓNICA-Presentaciónsssssss.pdf (20)
Último
Último (20)
MÁQUINASINCRÓNICA-Presentaciónsssssss.pdf
- 2. Máquina Sincrónica. Presa del Atazar, Madrid Ing. R. Paolillo – Agosto 2014 2
- 3. Generador Sincrónico. Central Hidroeléctrica. Transporte de Energía 3 Subestación de Transformación Distribución y Consumo
- 6. Generador Sincrónico. Central Térmica de Vapor. 6
- 7. Generador Sincrónico. Central Térmica de Ciclo Combinado. 7
- 8. Generador Sincrónico. Central Térmica Diesel. 8
- 9. Generador Sincrónico. Grupos Electrógenos Diesel. 9
- 10. Generador Sincrónico. Ferrocarriles. Locomotoras Diesel-Eléctricas (conocidas como Diesel): Motores diesel mueven alternadores conectados a rectificadores de estado sólido que alimentan motores eléctricos conectados a los ejes. Los sistemas de control y las funciones de regulación eléctrica se convirtieron en electrónicos. Microprocesadores controlan el rendimiento de todos los sistemas, la velocidad del motor, la inyección de gas oil y el trabajo del alternador y se interrelacionan con sistemas para detectar problemas de tracción en las ruedas motrices produciendo una rápida corrección y óptima adherencia. Una mejora importante fue el uso de 10 motores trifásicos de U y f variables en lugar de los motores serie de CC, reduciendo costo, mantenimiento, peso y mejorando la adherencia de las ruedas en la vía. Locomotoras Turbina-Eléctricas: turbinas de gas o vapor impulsaban generadores que alimentaban motores eléctricos. Año:2012
- 11. Generador Sincrónico. Central Térmica Nuclear. 1 1
- 13. Generador Sincrónico. Central Térmica Solar. 1 3
- 14. Generador Sincrónico. Central Térmica Solar. 1 4
- 16. Generación Mareomotriz y Undimotriz. 16
- 17. Energía Undimotriz – Investigación UTN FRBA. 17
- 18. Energía Undimotriz – Investigación UTN FRBA. El Proyecto de Aprovechamiento de la Energía Undimotriz fue distinguido en la categoría "Producto Innovador" durante la entrega de los premios INNOVAR 2010. (Ministerio de Ciencia, Tecnología e Innovación Productiva de la Nación). 18
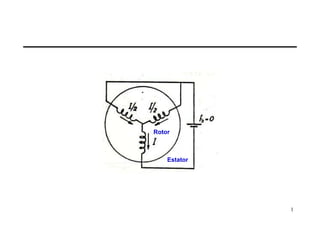
- 19. Inducido o armadura en el estator: Inducido o armadura en el rotor: Rotor de Polos salientes Generador Sincrónico. Tipos Constructivos. 19 Inducido o armadura en el estator: para medianas y altas potencias y siempre que se genere en alta tensión. Inducido o armadura en el rotor: usada en pequeñas potencias, cuando se reduce el espacio para fijar los polos en el eje. Rotor de Polos lisos Los alternadores de gran potencia accionados por turbinas de gas o vapor tienen eje horizontal, 2 o 4 polos y un diámetro generalmente menor que la longitud axial del núcleo. Por razones de equilibrio dinámico se reemplaza la rueda polar por un cilindro ranurado. Excitatriz: se denomina así a la máquina o equipo que alimenta el devanado de excitación. Constructivamente existen de muy variados tipos dependiendo también del parámetro que se quiera controlar (U salida de un generador o cos φ para un motor).
- 21. En vacío Fp Generador fem Generador Sincrónico. Reacción de Armadura. Motor fem Igual situación magnética habrá en un motor cuando tenga una Iexc : X ɸA ɸR ɸ 21 En carga Fp En vacío Carga R: Distorsiona. Carga L: Desmagnetiza. Carga C: Magnetiza. Normal Subexcitado Sobreexcitado X X X I E ɸA ɸR ɸ I E ψ ɸA ɸR ɸ I E ψ
- 22. Generador Sincrónico. Diagrama Fasorial. ∆U = Ia (Ra + j Xa) Ep = U + Ia (Ra + j (Xa + Xra)) FR = FP + FA 22 Siendo Xa + Xra = Xs Reactancia Sincrónica. Ep = U + Ia (Ra + j (Xa + Xra))
- 23. Generador Sincrónico. Características de Funcionamiento. 23
- 24. Generador Sincrónico. Características de Funcionamiento. VACIO EXTERNA Actúan la caída interna y la reacción de armadura. Si la carga es IND., la caída crece al bajar el cos φ. Cuando U=0 todas las curvas se cortan en Ik (Cte Cto Cto Trifásico). 24 CARGA REGULACIÓN Es la caída de tensión en carga nominal con cos φ = 0,8, siendo E0 fem en vacío para iexcn r ̳ E0 – Un 100 (%) Un
- 25. Generador Sincrónico. Características de Funcionamiento. Alternador alimentando una línea a U = cte para distintos tipos de carga (simplificado): 25 Para el caso inductivo, por ejemplo, resulta:
- 26. Generador Sincrónico. Impedancia de Sincronismo. Se hace girar al rotor a ns => f=cte para los dos ensayos y luego se varía iexc Si hay neutro se mide entre fase y neutro. E0 =U / √3 Característica de Vacio. 26 Midiendo la R de inducido => Xs = √Zs2 – Ri 2 Con este valor se puede hallar la regulación. Se halla la curva de Zs según Zs = E0 / Iacc que por efecto de la saturación y la reacción de inducido variará con iexc y con el factor de potencia. Este es un método aproximado y suele usarse el valor de Zs que resulta de E0=Un => Zs = AB/AC. Con iexc reducida se halla la corriente de excitación de cortocircuito Iacc y luego extrapolar ya que es una recta. Característica de Cortocircuito.
- 27. Generador Sincrónico. Paralelo de Alternadores. a) Condiciones de acoplamiento en vacio. Consideraremos dos pasos: a) Condiciones necesarias para conectar dos alternadores en paralelo. b) Condiciones necesarias para distribuir la carga. Si Ea = Eb y fa ≠ fb las lámparas tienen un “latido” (f de batido). La condición de paralelo se da cuando se apagan 27 Siendo: ea = Ea sen (Wat + Ɵa) eb = Eb sen (Wbt + Ɵb) Debe cumplirse constantemente: Ea = Eb tensiones iguales Wa = Wb frecuencias iguales Ɵa = Ɵb fases relativas iguales se da cuando se apagan También debe verificarse la igualdad de secuencias: si son distintas las lámparas se encienden cíclicamente (una apagada y dos encendidas). Diagrama del alternador en vacío. ɸ U = Ep δ = 0
- 28. Generador Sincrónico. Paralelo de Alternadores. FUNCIONAMIENTO EN PARALELO DE DOS ALTERNADORES IGUALES ALIMENTANDO BARRAS CON CARGA INDUCTIVA. IT = I1 + I2 = I’1 + I’2 AB y CD = corrientes de circulación entre alternadores debido a diferentes Ep. 28 δ1’ < δ1 E’p1 = Ep1 δ2’ > δ2 E’p2 = Ep2 Se parte de I1 = I2 ; iexc1 = iexc2 ; Ep1 = Ep2 ; φ1 = φ2 ; δ1 = δ2 Manteniendo U = cte., hacemos i’exc1 > iexc1 e i’exc2 < iexc2 Resulta que E’p1 > Ep1 y E’p2 < Ep2 Manteniendo U = cte. Y cos φ = cte. reducimos el agente energético del alternador 1 siendo iexc = cte. D AB = DB – DA (Diferencia entre la variación reactiva de I1 e I2)
- 29. Generador Sincrónico. Paralelo de Alternadores. FUNCIONAMIENTO EN PARALELO DE UN ALTERNADOR Y UNA FUENTE DE POTENCIA INFINITA. 29 Radio = Ep Variación de iexc a partir del paralelo en vacío. Variación del flujo del agente energético en la alimentación del motor de impulso. La variación de iexc cambia la distribución de la componente reactiva. La variación del combustible del motor de impulso cambia la distribución de la componente activa. Aumento de iexc. Disminución de iexc.
- 30. Motor Sincrónico. Principio de Funcionamiento y Diagrama Fasorial. O en general: U = - Ep + I Zs Fig. 2 (Para R≠0) Con lo que se da a Ep el sentido de fem. Si U=Ep y δ=0 => Paralelo en vacío. Si ahora δ cambia de sentido ⇒ Ep retrasa respecto de U ⇒ La rueda polar es arrastrada por el campo rotante de la armadura. U = - Ep + I Xs Fig. 1 (Para R=0) 30 Fig. 2 La velocidad del motor queda fijada por el Nº de polos de la máquina e independiente de la carga. Fig. 1
- 31. Motor Sincrónico. Balance de Potencias. Potencia Nominal dada en [kVA o MVA] Como ɳ ̳ 1 – Σ p p + Σ p resulta para cos φ = 0,8 P = 0,5 a 3 MW => ɳ = 92 a 95 %. P = 3,5 a 300 MW => ɳ = 95 a 98 %. Potencia entregada en el eje (pfe + pj) Rotor ph + pf + pj Fricción + Ventilación pF + pv Potencia campo rotante m.Ia 2.Ra Potencia salida en estator GENERADOR pfe Estator ph + pf 31 MOTOR P campo giratorio = Ps = m.E.I.cos ψ en [Watts] C = 0,975 m Ps / ns C en [Kgm] Ps en [Watts] ns en [rpm] P = 3,5 a 300 MW => ɳ = 95 a 98 %. Potencia entrada estator (pfe + pj) Rotor ph + pf + pj Fricción + Ventilación pF + pv Potencia campo rotante m.Ia 2.Ra Potencia salida en el eje pfe Estator ph + pf Potencia Nominal dada en [kW o HP o CV]
- 32. Motor Sincrónico. Potencia y Par Motor. Para el caso general de la máquina de polos salientes y despreciando las caídas óhmicas: Ia cos φ = Id sen δ + Iq cos δ Si m.Ia 2.Ra = 0 (2 - 3 % de Pmáquina) Tenemos Ps = m.U.Ia.cos φ 32 Del gráfico resulta: Iq Xq = U.sen δ => Iq = U.sen δ Xq U.cos δ = Ep – Id.Xd => Id = Ep - U.cos δ Xd Reemplazando en (1) a Id e Iq obtenemos: Ps = m.Ep .U sen δ - m.U2 cos δ sen δ + m.U2 sen δ cos δ Xd Xd Xq Ps = m.U.(Id sen δ + Iq cos δ) (1)
- 33. Motor Sincrónico. Potencia y Par Motor. Ps = m.Ep.U sen δ Xd MÁQUINA DE POLOS LISOS (Xd = Xq) En definitiva nos queda: MÁQUINA DE POLOS SALIENTES Ps = m.Ep .U sen δ + m.U2 Xd - Xq sen 2δ Xd 2 Xd . Xq 33 Como C depende directamente de Ps, tiene idéntica variación.
- 34. Motor Sincrónico. Potencia y Par Motor - Conclusiones. Alcanza su Pmax para δ < π/2. Límite de estabilidad se alcanza antes de que la rueda polar quede en cuadratura atrasada con el campo rotante del estator. Máquina de Polos Salientes En funcionamiento normal Ep U => Ps ≈ U2. Como C ≈ Ps le son aplicables todas las conclusiones mecánicas. = ~ 34 Alcanza Pmax para a δ = π/2. Zona de funcionamiento estable entre δ=0 y δ=π/2. (A cada aumento de P corresponde un aumento de o de δ. Cuando se sobrepasa el límite pierde el sincronismo. con el campo rotante del estator. A estatores iguales tiene mayor potencia. Puede desarrollar cierta potencia sin excitación, es decir Ep=0 produciéndose la máxima con δ=45º. Máquina de Polos Lisos Motores de Reluctancia: pequeños motores que funcionan sin la fuente de corriente continua, solo basta un rotor con expansiones polares. La anisotropía del entrehierro crea direcciones de distinta reluctancia por lo que aparece Xd > Xq. Tiene poca potencia para su volumen y consume una corriente muy reactiva.
- 35. Compensación del cos φ Motor Sincrónico. Compensador Sincrónico y Curvas V. Compensador Sincrónico: si funciona sin carga mecánica en el eje, al solo efecto de mejorar el cos φ. Reacción de Armadura: si U=cte. y la carga en el eje es cte., al aumentar la iexc aumenta Ep y la Ia se adelanta a U => la línea ve al motor como una carga capacitiva (sobreexcitado) y viceversa más inductiva cuanto menor es iexc (subexcitado). iexc Compensación del cos φ con el motor en carga. 35 iexcn: es la que produce cos φ=1 con carga nominal en el eje. Para cada carga existe una iexc que hace mínima a Ia produciendo las mínimas pérdidas en el cobre (óptimo).
- 36. Motor Sincrónico. Métodos de Arranque. 1) Mediante Jaula de Ardilla provista al rotor: Se aplica U al estator con iexc = 0 => arranca como motor asincrónico. Al llegar prácticamente a ns se alimenta el campo y el rotor se engancha con el campo rotante del estator. El rotor queda girando a ns por lo que la jaula ya no interviene en el movimiento. Durante el arranque se inducen en el bobinado del rotor grandes tensiones por lo que se debe cortocircuitar mediante una resistencia para no dañar la aislación. 36 lo que se debe cortocircuitar mediante una resistencia para no dañar la aislación. El cortocircuito directo no es adecuado ya que circularían altas corrientes que generarían una cupla frenante tal que dificultaría el arranque. 2) Mediante Motor Auxiliar de Impulso: Se utiliza solo para grandes máquinas. Consiste en llevar al rotor a ns con un motor auxiliar de impulso, funcionando como alternador en vacío. Luego de desconectar la alimentación del motor auxiliar queda funcionando como motor. Con este método se consiguen bajas corrientes de inducido en el momento de la conexión.
- 37. Motor Sincrónico. Aplicaciones. De lo visto precedentemente se concluye que este motor se utiliza donde se necesita: a) Velocidad absolutamente constante. (independiente de la carga). 37 b) Servicio sin arranques frecuentes. (ininterrumpido). c) Posibilidad de mejorar el factor de potencia. Regulando a cos φ = 1.
- 38. 1) FRAILE MORA, J. (2008). Máquinas Eléctricas. Madrid: Mc Graw-Hill. 2) FITZGERALD, A. E; KINSGLEY, C.; UMANS, S. (2004). Máquinas Eléctricas. Madrid: McGraw-Hill. 3) SOBREVILA, M. (2000). Máquinas Eléctricas – Nivel Inicial. Buenos Aires: Alsina. 4) KOSTENKO, M. P.; PIOTROVSKI, L. M. (1976). Máquinas Eléctricas -Tomo II. Motor Asincrónico Trifásico. Bibliografía. 4) KOSTENKO, M. P.; PIOTROVSKI, L. M. (1976). Máquinas Eléctricas -Tomo II. Moscú: MIR. 5) Figuras varias de Internet. 38