Descargar para leer sin conexión

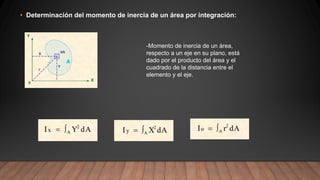
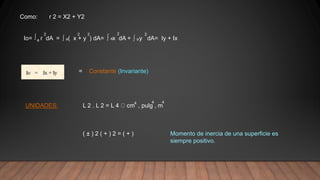

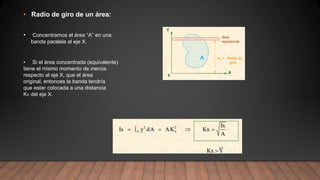
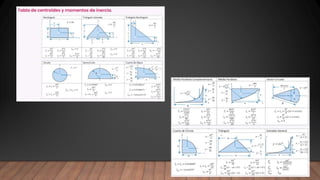

Este documento describe los conceptos fundamentales de los momentos de inercia y sus componentes. Explica que el momento de inercia depende de la geometría del cuerpo y la posición del eje de giro, pero no de las fuerzas involucradas. También cubre temas como la determinación del momento de inercia por integración, el teorema de los ejes paralelos, los momentos de inercia de áreas compuestas y el círculo de Mohr para calcular momentos y productos de inercia con respecto a ejes orientados.



































