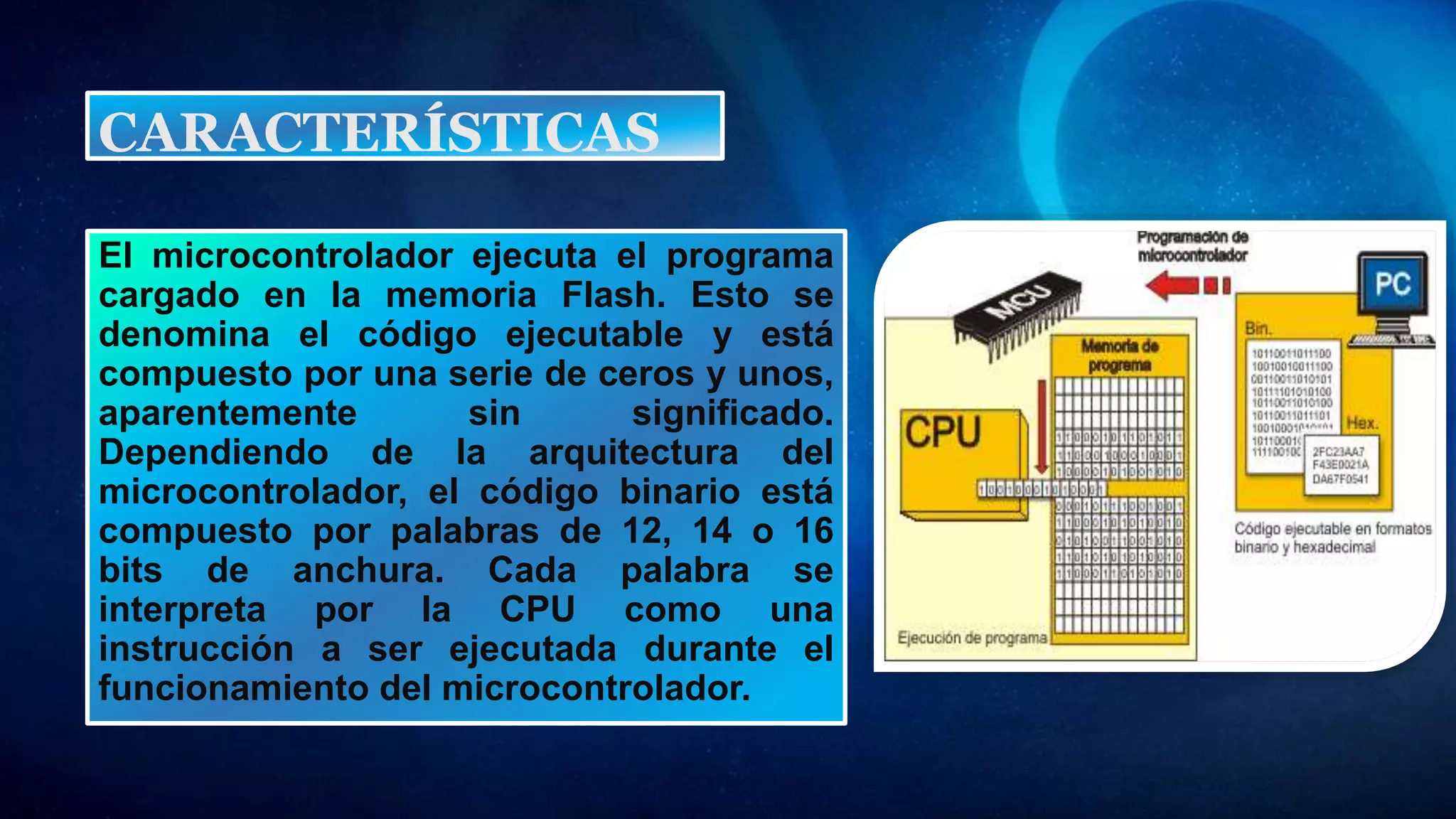
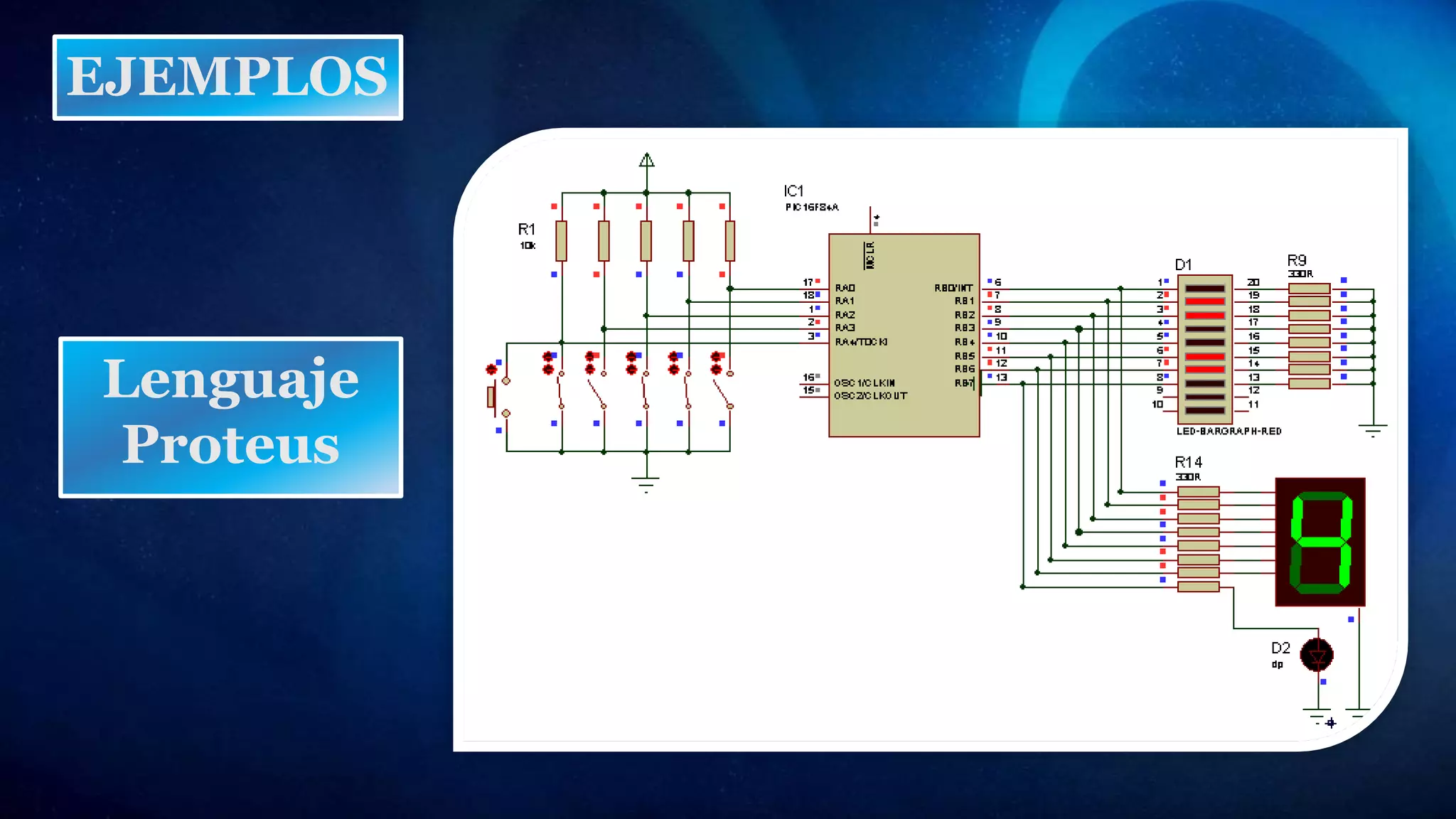
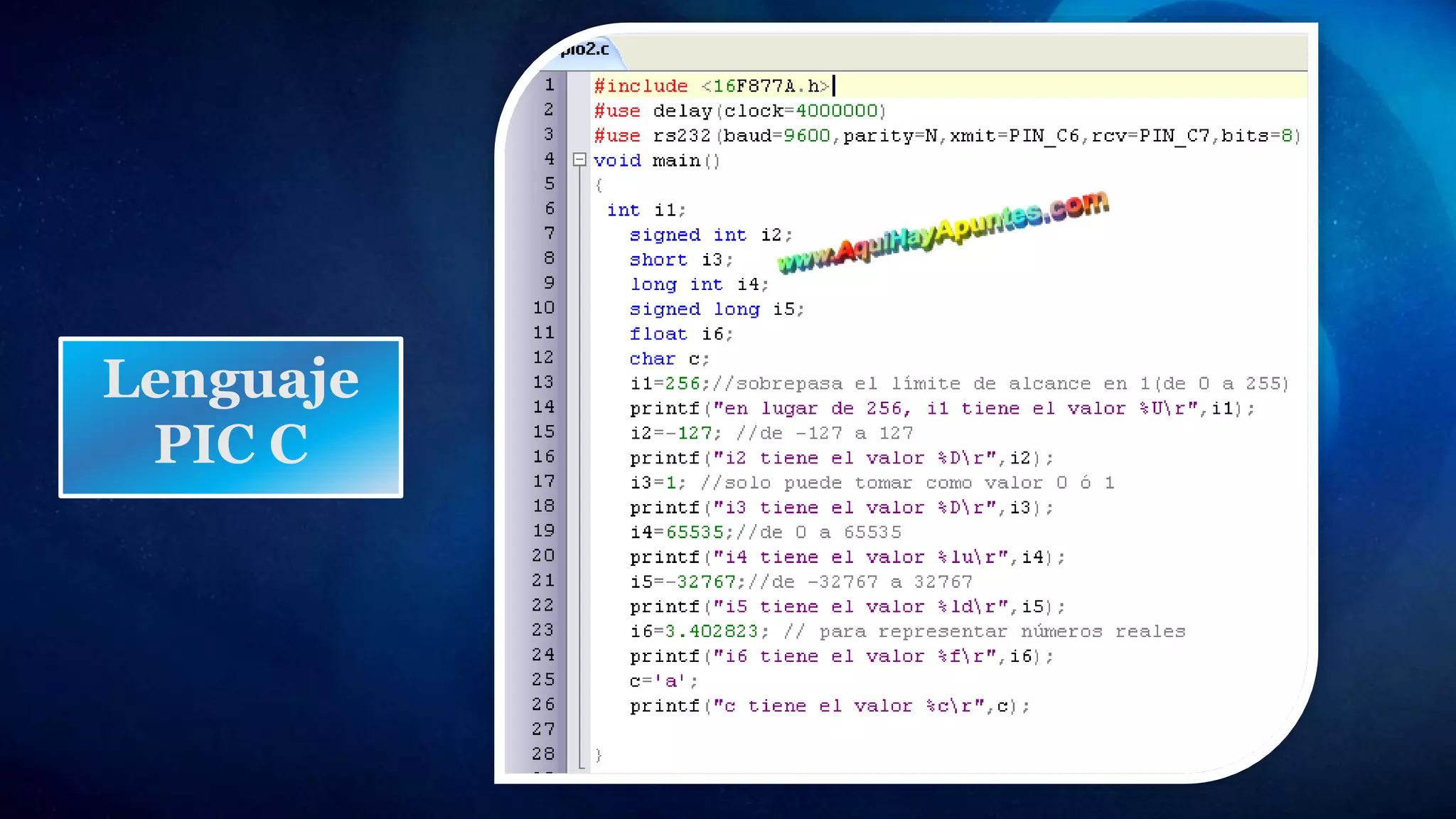
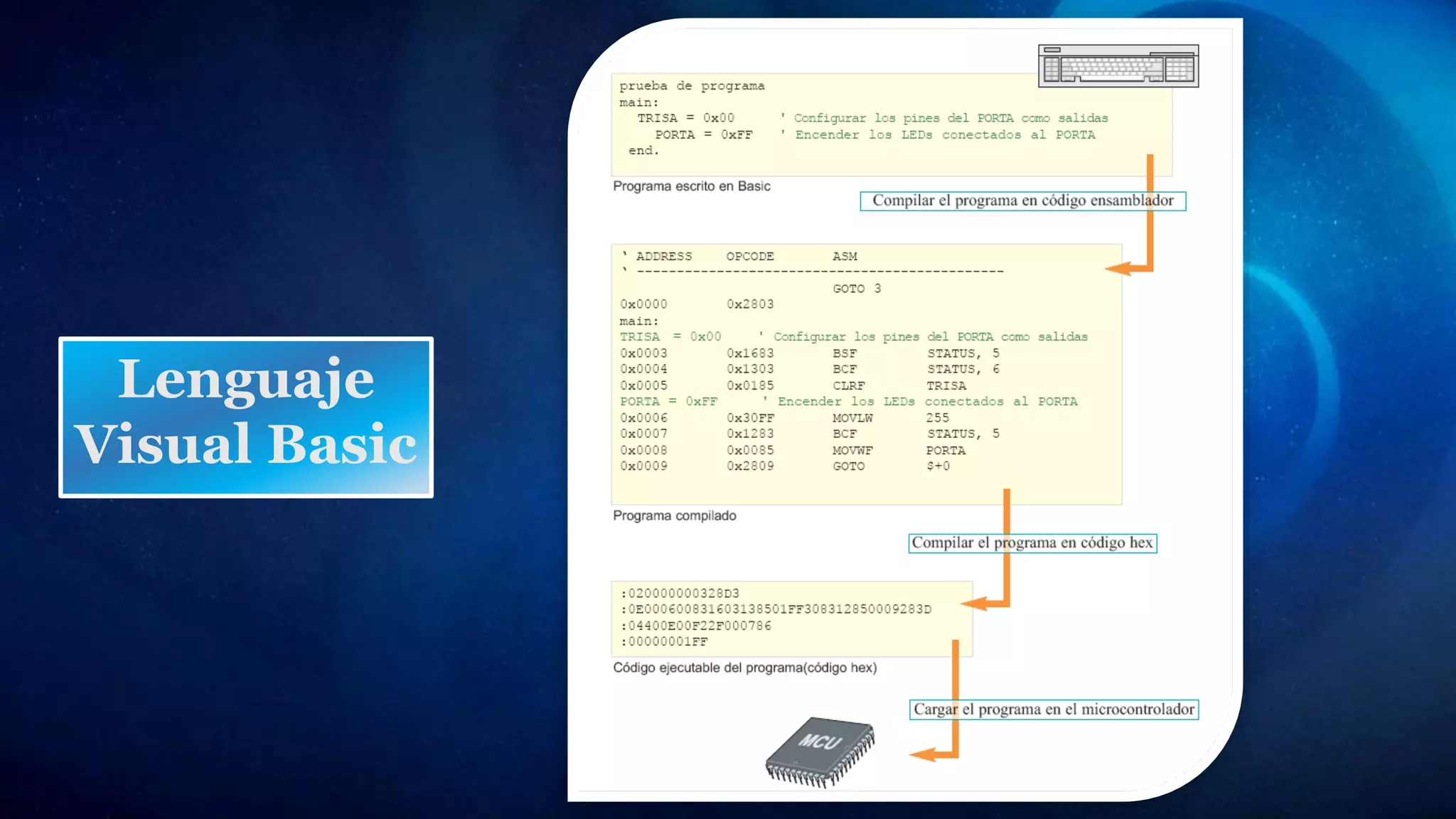
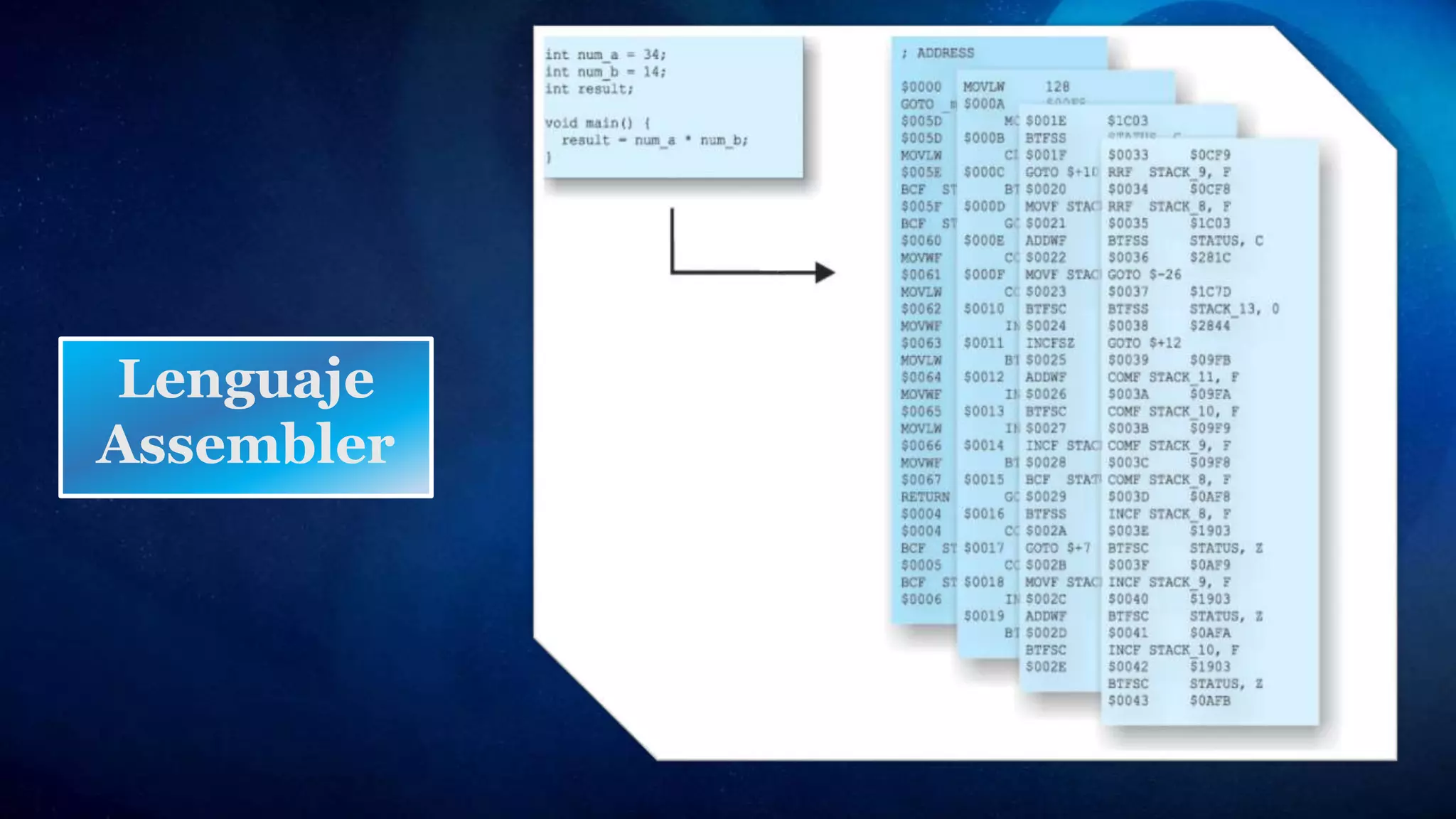
Los microcontroladores y microprocesadores son diferentes en funcionalidad, siendo el microcontrolador capaz de ejecutar programas cargados en su memoria flash. El entorno de programación y simulación Proteus se utiliza para desarrollar proyectos de electrónica, y se pueden emplear diversos lenguajes de programación como C, Visual Basic y ensamblador para interactuar con microcontroladores. Se recomienda optimizar el uso de tipos de datos en programación para evitar problemas de memoria, y se presenta un grabador para microcontroladores PIC que permite cargar programas bajo un protocolo específico.