Descargar para leer sin conexión


























![TIPOS DE MOVIMIENTOS
TIPOS DE MOVIMIENTO HACIA UN PUNTO
J (JOINT): MOVIMIENTO ANGULAR → J P[1] 100% FINE
L (LINEAR): MOVIMIENTO LINEAL → L P[1] 2000MM/S FINE
C (CIRCULAR) MOVIMIENTO CIRCULAR→C P[2] (DE PASO)](https://image.slidesharecdn.com/programacionfanuc-221103225343-bbc6c9e4/85/programacion-FANUC-ppt-29-320.jpg)




![INSTRUCCIONES TPE
(INSTRUCCION DE SALTO CONDICIONAL)
UNA INSTRUCCION DE SALTO CONDICIONAL PERMITE
EFECTUAR UN SALTO O BUCLE A UNA ETIQUETA
SITUADA EN EL MISMO PROGRAMA SI Y SOLO SI
CIERTAS CONDICIONES SON VERDADERAS
INSTRUCCION
IF R[N] = valor de registro JMP LBL
IF AI[n] < constante JMP LBL
IF DI[n] > ON JMP LBL
IF GI[n] < = numero binario JMP LBL](https://image.slidesharecdn.com/programacionfanuc-221103225343-bbc6c9e4/85/programacion-FANUC-ppt-34-320.jpg)







![INSTRUCCIONENESPERA
PORUNACONDICION
RETARDAN LA EJECUCIÓN DE UN PROGRAMA HASTA
QUE SEA VERDADERA UNA CONDICION DURANTE UN
TIEMPO INFINITO O UN TIEMPO ESPECIFICADO EN LA
VARIABLE $WAITTMOUT.
WAIT = [VALOR1] [OPERADOR][VALOR2]
[VALOR 1]: REGISTRO, I/O
[OPERADOR]: UN TEST DE IGUAL (=), TEST DE DIFERENCIA(<>)
[VALOR 2]:CONSTANTE, ON/OFF, VALOR DE UN REGISTRO, VALOR DE
ENTRADA SALIDA I7O](https://image.slidesharecdn.com/programacionfanuc-221103225343-bbc6c9e4/85/programacion-FANUC-ppt-42-320.jpg)
![LLAMADADEPROGRAMA
PERMITE LANZAR UN PROGRAMA O SUBRUTINA
F1: [INST] CALL SELECCION DE SUBRUTINA
NOTA: UNA VEZ TERMINA EL PROGRAMA O SUBRUTINA,
EL CURSOR SE COLOCA DEBAJO DE LA INSTRUCCION
CALL Y CONTINUA EN EL PROGRAMA PRINCIPAL.](https://image.slidesharecdn.com/programacionfanuc-221103225343-bbc6c9e4/85/programacion-FANUC-ppt-43-320.jpg)









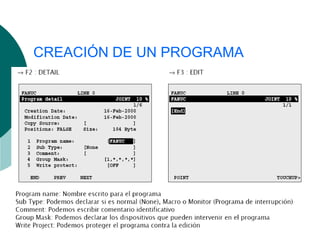
Este documento presenta una introducción a los robots industriales. Explica las características generales de un robot, incluyendo sus principales componentes como la unidad mecánica, el controlador y los dispositivos de entrada y salida de datos. También describe conceptos clave como las coordenadas del robot, la creación y ejecución de programas, y diferentes técnicas de programación como las instrucciones condicionales.


































































