Este documento describe las características y funcionalidades del robot CRS F3 de THERMO. El robot tiene 6 ejes, un alcance de 710 mm, y una carga máxima de 3 kg. Se controla mediante un controlador C500C y un teach pendant que permite enseñar posiciones y crear programas usando el lenguaje RAPL-3. El documento explica los componentes del robot, sus especificaciones técnicas, y los comandos y estructuras básicas para programar sus movimientos.
![ROBOT
PRÁCTICAS DEL
GENERALIDADES.
El robot CRS F3 de THERMO fija un nuevo estándar para los robots “humano-escala”, entregando una
combinación de gran alcance de velocidad, de confiabilidad, de facilidad de empleo. Está constituido
por un brazo articulado de seis grados de libertad y de un de gran alcance, la unidad controladora
(controlador C500C), un programador manual o teach pendant, cables umbilicales y una computadora
personal.
FIGURA 1. Componentes del robot.
CARACTERÍSTICAS FÍSICAS DEL CRS F3
Dentro de las principales características del CRS F3 tenemos que cuenta con 6 ejes, pesa 52 kg [115
lb], la carga que soporta es de 3 kg [6.6 lb], tiene un alcance de 710 mm [28 in.], la repetibilidad que
proporciona es de ± 0.05 mm [0.002 in.], su resolución es de 2048 pulsos por vuelta del motor, la
velocidad máxima que alcanza en una interpolación lineal es de 4 m/s, cuenta con un sistema de
impulso electromecánico, motores sin cepillo y encoders absolutos en cada eje, su transmisión es por
medio de impulsiones armónicas y tiene frenos en los ejes 1, 2, y 3.](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-2-320.jpg)




![ROBOT
PRÁCTICAS DEL
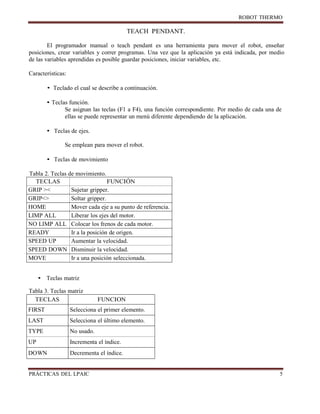
Tabla 6. Comandos y estructuras.
COMANDO ACCION
MAIN
Declaración de inicio del programa
Main
END MAIN
Declaración de fin de programa
End main
CLOC
Posición cartesiana. Se declara el tipo de posición a utilizar.
Así mismo se declaran el número de posiciones a utilizar y el nombre de la cadena.
Cloc [20]a
PLOC
Posición de precisión. Declara el tipo de posición a utilizar, así mismo se declaran el
número de posiciones [10] a utilizar y el nombre de la cadena, “a”
Ploc[10]a
TEACHABLE
Declaración de una variable que se enseña al programa
Teachable ploc [10]a
INT
Tipo de variable entera
Int variable.
Int va, vm, vb.
En este ejemplo se declaran los nombres de las variables para manejar tres tipos de
velocidad siendo va = velocidad alta, vm= velocidad media y vb= velocidad baja.
FLOAT
Tipo de variable flotante
Float
STRING
Tipo de variable String
String.
READY
Posición inicial del robot o posición absoluta.
Ready ()
MOVE
Mueve el brazo a la posición especificada por la variable de posición. El movimiento
es realizado en forma de interpolación lineal.
Ejemplo:
Move (a[5]) mueve el brazo a la posición 5 en la cadena “a”
FINISH
Espera a que el robot deje de moverse para realizar el siguiente comando.
Finísh()](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-9-320.jpg)

![ROBOT
PRÁCTICAS DEL
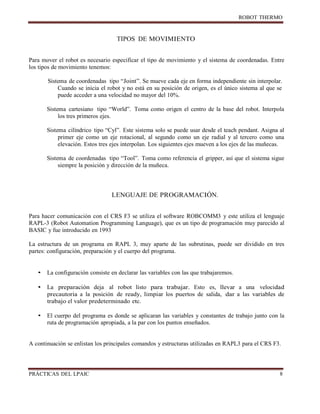
Tabla 6. Comandos y estructuras. (Continuación)
COMANDO ACCION
DO
Funciona prácticamente igual que while, cicla mientras su función sea verdadera. La
diferencia es que Do primero realiza y después compara, al contrario que while.
Int. Contador
Do
Move (a)
Move(b)
Contador = Contador +1
Until contador >5
FOR
Se usa para crear ciclos controlados en número, en este caso usamos una variable
entera “x”. Al inicio del ciclo establecemos de dónde a dónde debe contarse.
Int. X
Ploc posición [120]
For x=1 to 100 step 10
Move posición [x]
End for
PRINTF
El comando nos permite desplegar mensajes en la pantalla
Printf (“inicio”)
GRIPPER
OPEN
Suelta la herramienta
Grip_open()
GRIPPER
CLOSE
Sujeta la herramienita
Grip_close()
PENDANT Estado en la Terminal, se envía el control al teach pendant
ASH Muestra el directorio de programas
REFRESH Este comando ejecuta las modificaciones hechas al programa
RUN Ejecución del programa
EXIT Sale de la aplicación en curso.
OUTPUT Habilita el estado de una salida
INPUT Verifica la señal de entradas.](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-11-320.jpg)




![ROBOT
PRÁCTICAS DEL
2.3 Generar código del programa.
Esto sirve para definir las variables del programa y posteriormente grabar los movimientos requeridos.
Se realizará una rutina en donde el robot realice una secuencia de 4 puntos y aumente su velocidad,
realice la misma secuencia de puntos y vuelva a aumentar su velocidad. Así sucesivamente y cuando
llegue a su máxima velocidad, vuelva a comenzar desde el principio. Y despliegue en la pantalla cada
vez que cambie de velocidad.
• En el editor del programa se tecleara el siguiente código:
main
teachable ploc [10]a
teachable ploc [10]b
teachable ploc [10]c
teachable ploc [10]pinta
teachable ploc [10]pinza
int n
int baja, media
int in, neuma
int done
media=30
baja=15
done=7
in=4
neuma=6
for n=1 to 16
output (n,0)
output (neuma,0)
output (in,0)
ready()
delay (10)
end for
printf("Tomar la pinzan")
speed (baja)](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-16-320.jpg)
![ROBOT
PRÁCTICAS DEL
move(pinza[0])
move(pinza[1])
move(pinza[2])
move(pinza[3])
move(pinza[4])
finish()
grip_open()
move(pinza[5])
move(pinza[6])
move(pinza[7])
move(pinza[8])
move(pinza[9])
finish()
output(neuma,1)
output(in,1)
printf("Voy por la piezan")
speed(media)
move(a[0])
move(a[1])
move(a[2])
move(a[3])
finish()
output(in,0)
move(a[4])
move(a[5])
move(a[6])
move(a[7])
finish()
output(in,1)
move(a[8])
move(a[9])
output(in,0)
output(neuma,0)
printf("Dejo la pinzan")
speed(baja)](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-17-320.jpg)
![ROBOT
PRÁCTICAS DEL
move(pinza[9])
move(pinza[8])
move(pinza[7])
move(pinza[6])
move(pinza[5])
move(pinza[4])
finish()
grip_close()
move(pinza[3])
move(pinza[2])
move(pinza[1])
move(pinza[0])
printf("Tomar boquilla de pinturan")
speed (baja)
finish()
move(pinta[0])
move(pinta[1])
move(pinta[2])
move(pinta[3])
move(pinta[4])
finish()
grip_open()
move(pinta[5])
move(pinta[6])
move(pinta[7])
move(pinta[8])
finish()
printf("Proceso de pintadon")
speed (media)
output(neuma,1)
output(in,1)
move(c[0])
output(in,0)
move(b[1])
move(b[2])
output(in,1)
move(b[3])
move(b[4])](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-18-320.jpg)
![ROBOT
PRÁCTICAS DEL
output(5,1)
delay(5000)
move(b[5])
move(b[6])
output(in,0)
move(b[7])
move(b[8])
finish()
output(in,1)
output(5,0)
finish()
output(in,0)
output(neuma,0)
move(b[9])
finish()
printf("Dejar la boquilla de pinturan")
speed (baja)
move(pinta[8])
move(pinta[7])
move(pinta[6])
move(pinta[5])
move(pinta[4])
finish()
grip_close()
move(pinta[3])
move(pinta[2])
move(pinta[1])
move(pinta[0])
finish()
printf("Tomar la pinzan")
speed (baja)
move(pinza[0])
move(pinza[1])
move(pinza[2])
move(pinza[3])
move(pinza[4])
finish()](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-19-320.jpg)
![ROBOT
PRÁCTICAS DEL
grip_open()
move(pinza[5])
move(pinza[6])
move(pinza[7])
move(pinza[8])
move(pinza[9])
finish()
output(neuma,1)
output(in,1)
printf("Dejo la piezan")
speed (media)
move(c[0])
move(c[1])
move(c[2])
finish()
output(neuma,0)
move(c[3])
move(c[4])
move(c[5])
finish()
output(neuma,1)
move(c[6])
move(c[7])
finish()
output(neuma,0)
move(c[8]);;
move(c[9])
printf("Dejo la pinzan")
speed(baja)
move(pinza[9])
move(pinza[8])
move(pinza[7])
move(pinza[6])
move(pinza[5])
move(pinza[4])](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-20-320.jpg)
![ROBOT
PRÁCTICAS DEL
finish()
grip_close()
move(pinza[3])
move(pinza[2])
move(pinza[1])
move(pinza[0])
output(done,1)
ready()
printf("Fin de programan")
end main
2.4 Compilar.
Aquí se revisa la sintaxis del programa así como el uso correcto de las variables.
• Se compila el programa presionando el icono
2.5 Transferir.
• Ya que se ha revisado el programa, es enviado al controlador, por medio de la aplicación;
para esto se presiona el icono:
2.6 Llamar programa desde la terminal.
• En la terminal se teclea el comando “ash” y aparecerán todos los programas disponibles.
• Se escribirá el nombre del programa.
2.7 Enviar control al Teach pendant.
• Desde la terminal se teclea “pendant” y el teach recupera el control.
Ahora se puede manipular el robot con el teach.
2.8 Enseñanza de la trayectoria al robot.
Se realizará punto por punto, en esta ocasión se grabaran 4 movimientos.
• Una vez que se tiene el control en el teach pendant, en su pantalla se observa el nombre de la
aplicación y la opción 1Edit y la 2Run. Se selecciona de este la opción F1 (EDIT)
• Del menú que aparece se selecciona VAR para seleccionar la variable con la que se va a
trabajar. ( en este caso “a”)](https://image.slidesharecdn.com/thermof3-191027155733/85/Thermof3-21-320.jpg)











































![Proyecto_Brazo_Robotico_Industrial[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/proyectobrazoroboticoindustrial1-241109233059-95a121ba-thumbnail.jpg?width=640&height=640&fit=bounds)


















