Descargar para leer sin conexión
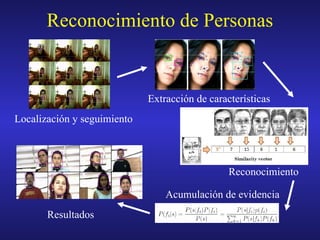




El documento describe cómo un robot puede coordinar módulos como reconocimiento de personas, seguimiento, extracción de características y acumulación de evidencia mediante Procesos de Decisión de Markov para realizar tareas como navegación, seguimiento de personas, búsqueda de objetos e identificación de personas. Los mismos módulos pueden usarse para diferentes tareas simplemente cambiando la especificación del coordinador basado en MDP.

















![Trabajo Naturalesa Cientificos[1]](https://cdn.slidesharecdn.com/ss_thumbnails/trabajonaturalesacientificos1-091113081502-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





























