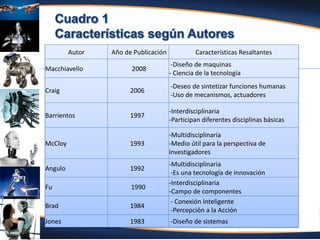
El documento presenta información sobre la robótica y la inteligencia artificial. Resume que la robótica es una tecnología multidisciplinaria que consiste en el diseño y construcción de máquinas inteligentes, apoyándose en disciplinas como la teoría de control, mecánica, electrónica, matemáticas e informática. Además, explica algunos tipos de robots y sus aplicaciones en diferentes campos como la industria, medicina, agricultura y el espacio.