

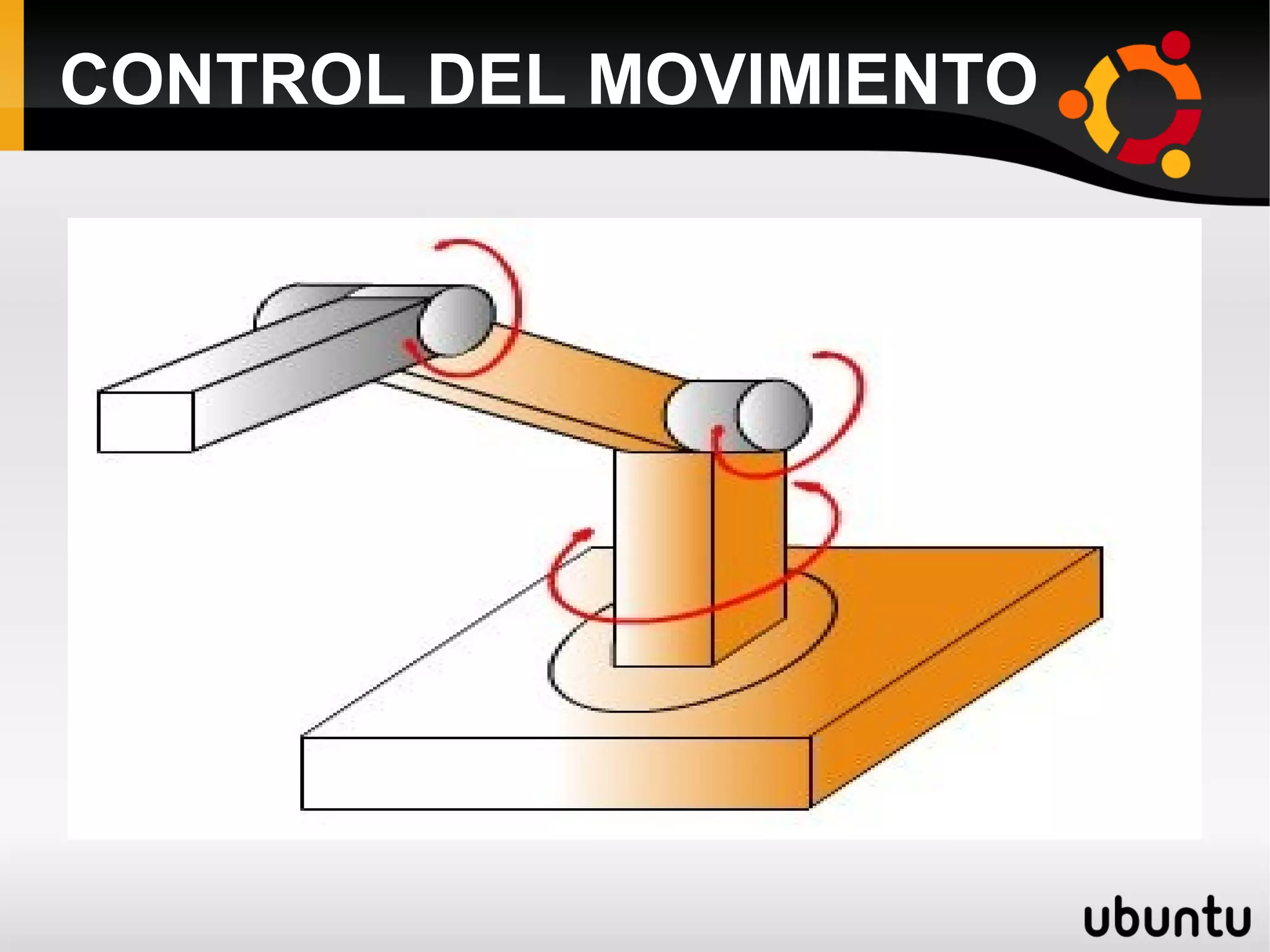

Este documento resume las características y la historia de las máquinas automáticas y los robots. Explica que los robots son máquinas programables que pueden realizar tareas complejas. Detalla los tipos de robots, sus partes y cómo se mueven. También describe las leyes de la robótica creadas por Isaac Asimov y presenta dos robots notables: ASIMO, el robot más humanoide, y Curiosity, el robot explorador de la NASA en Marte.















































