Descargar como PDF, PPTX




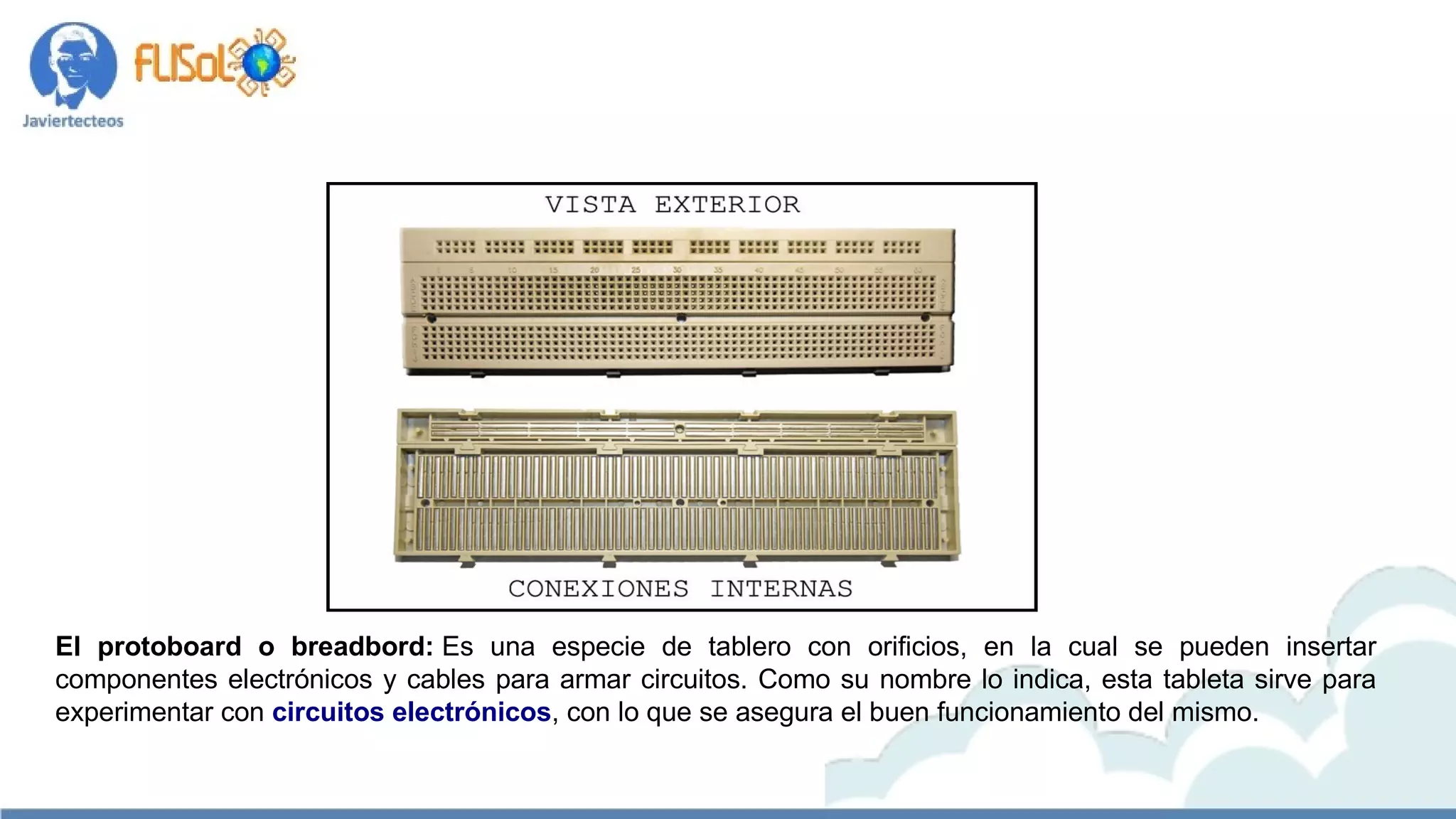

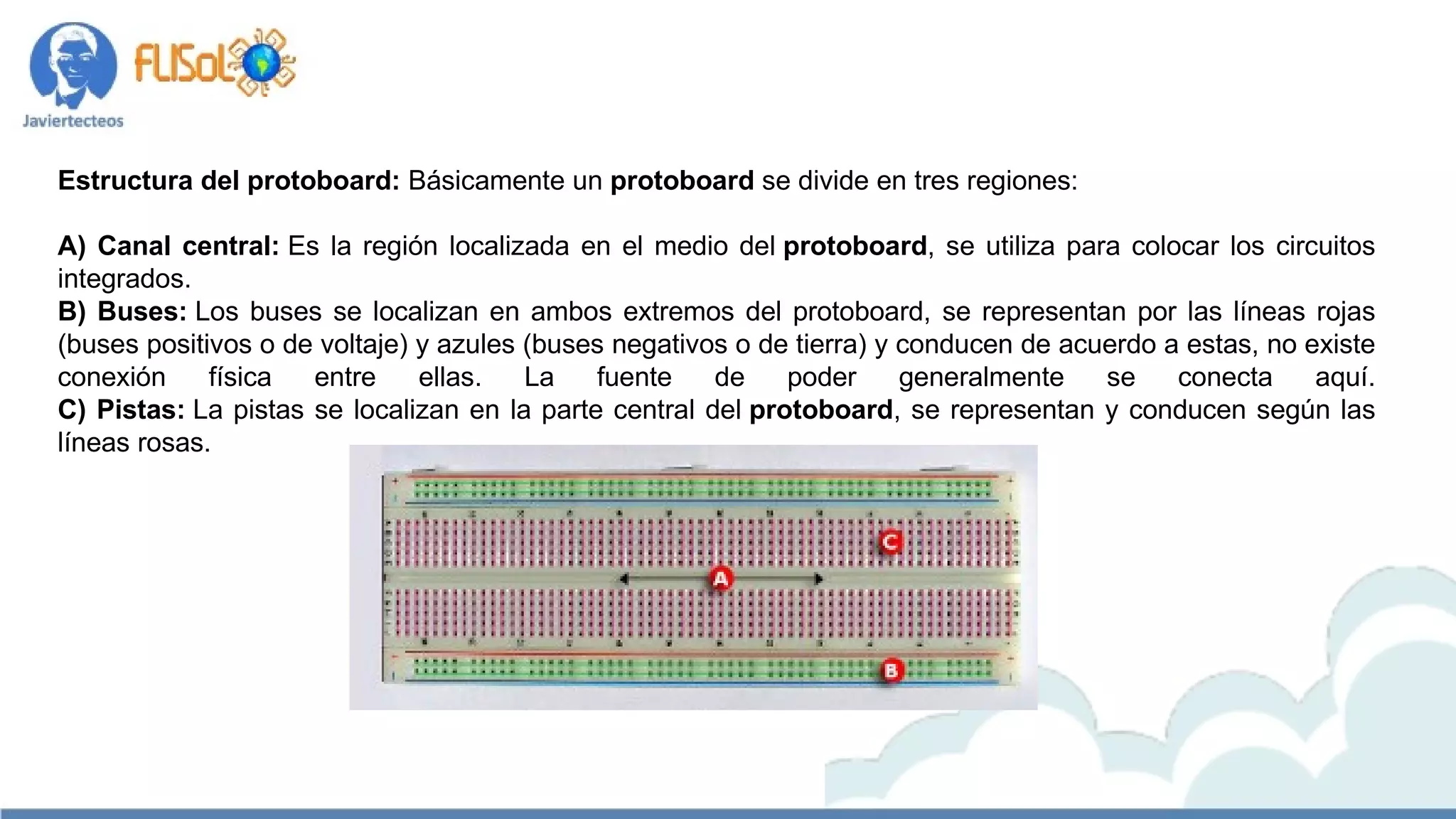




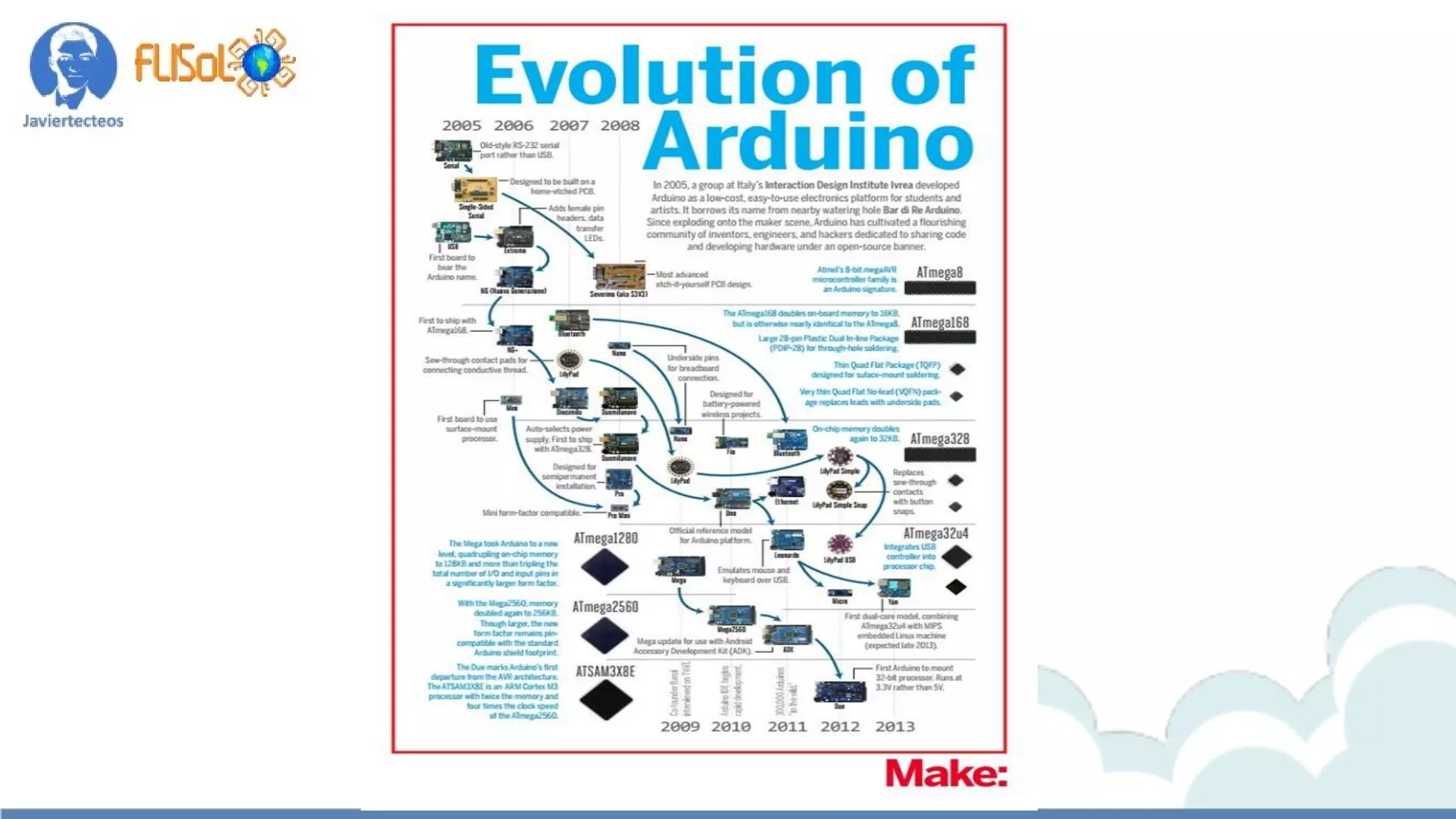

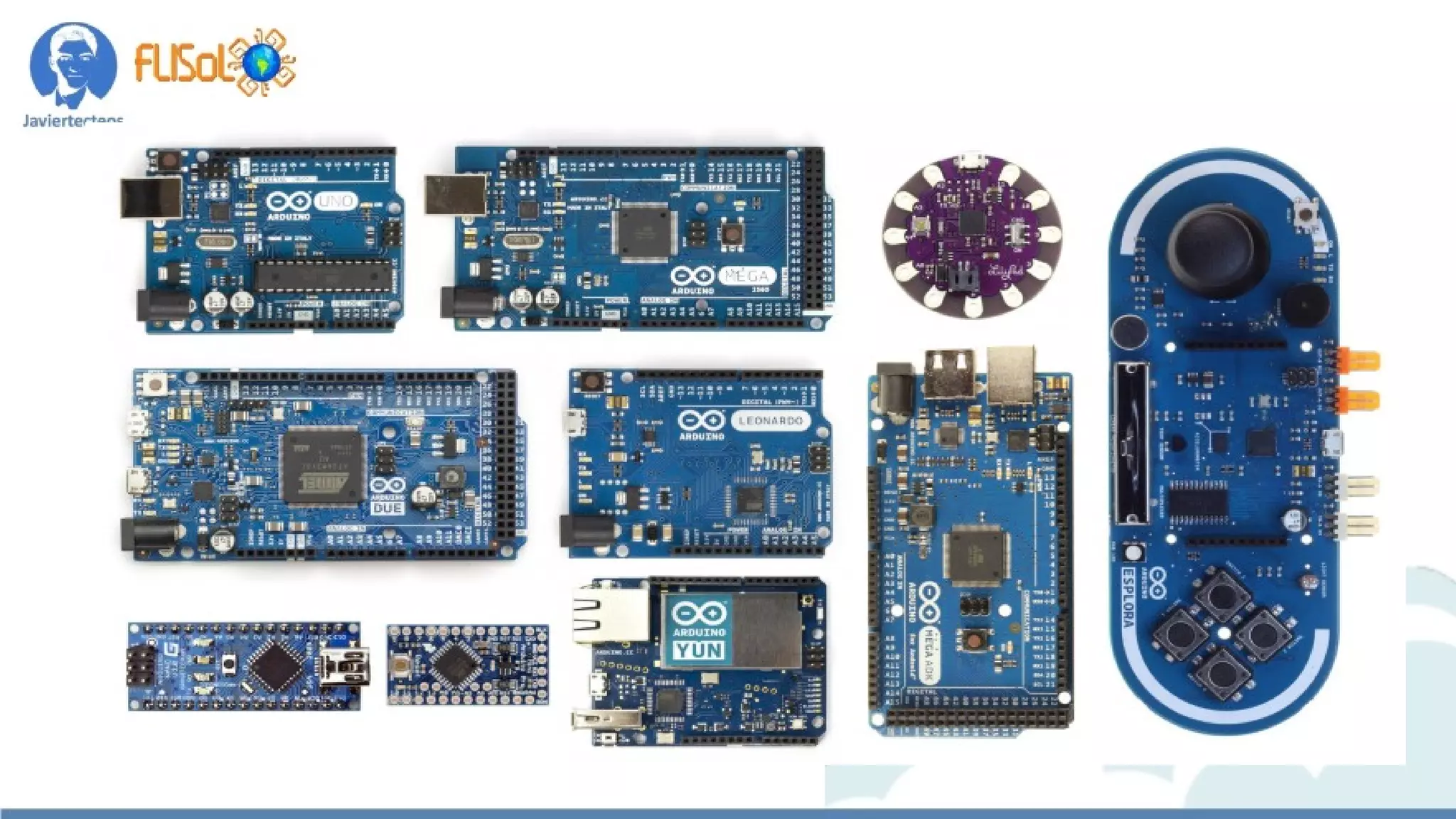

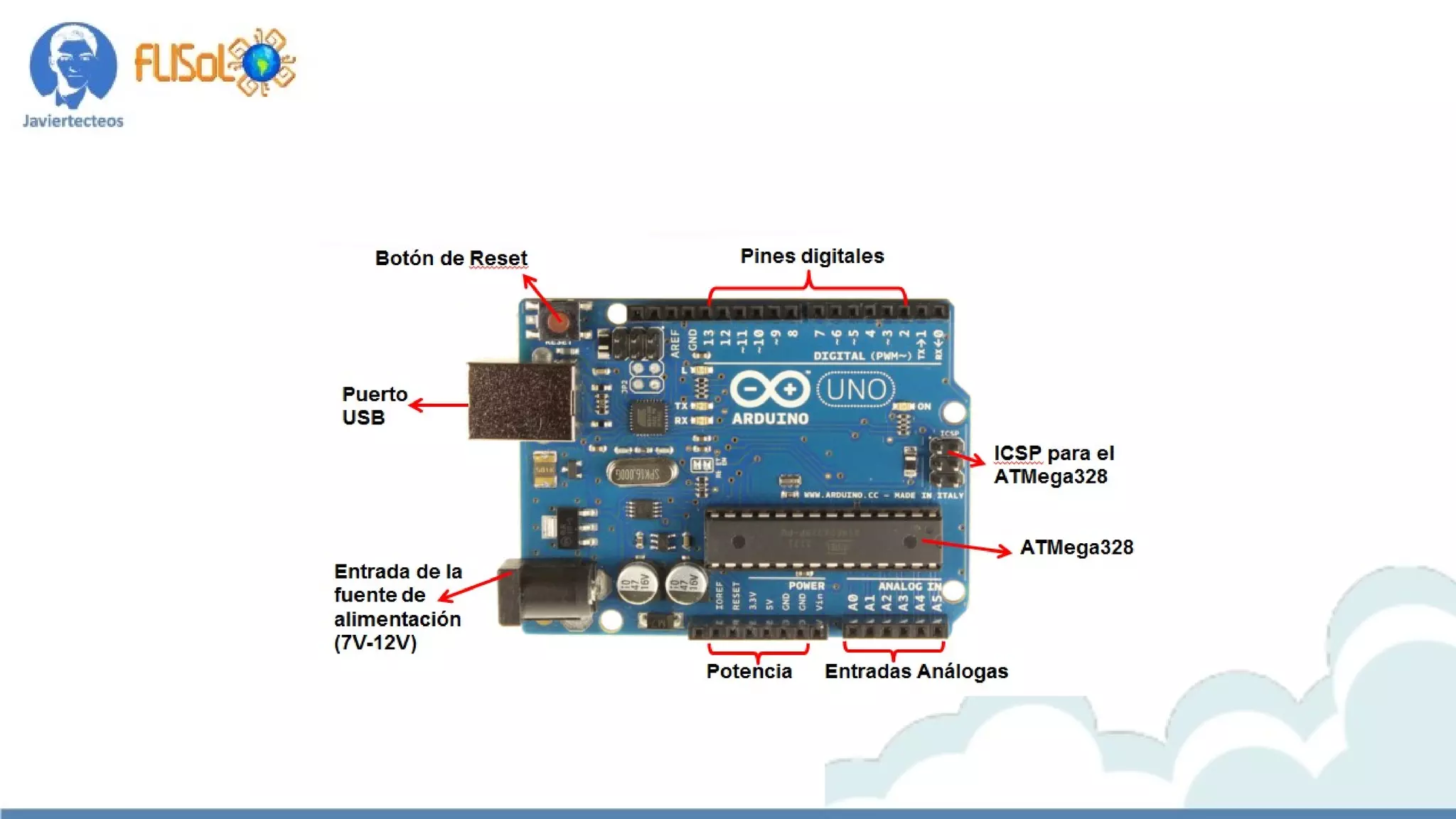
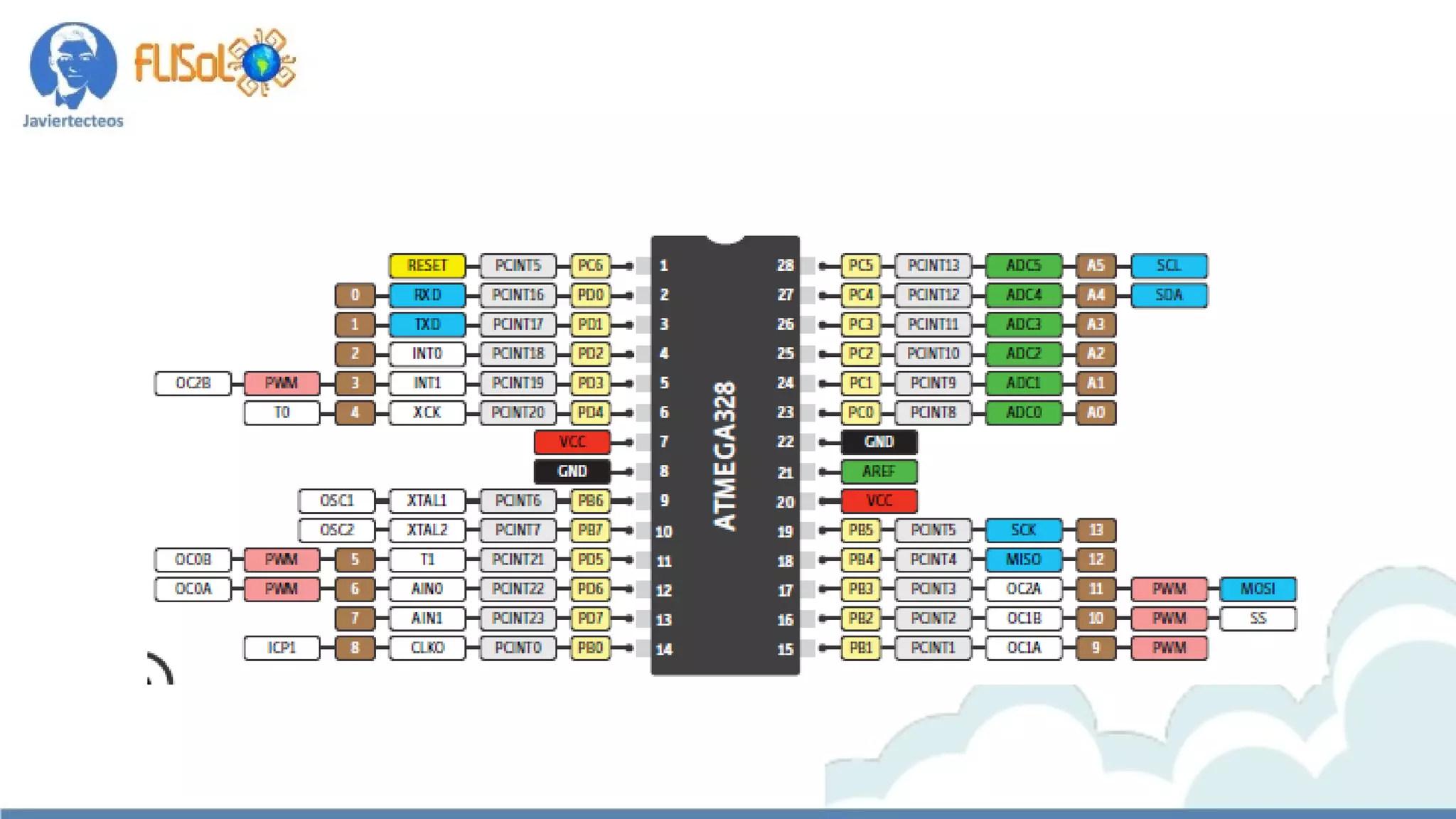
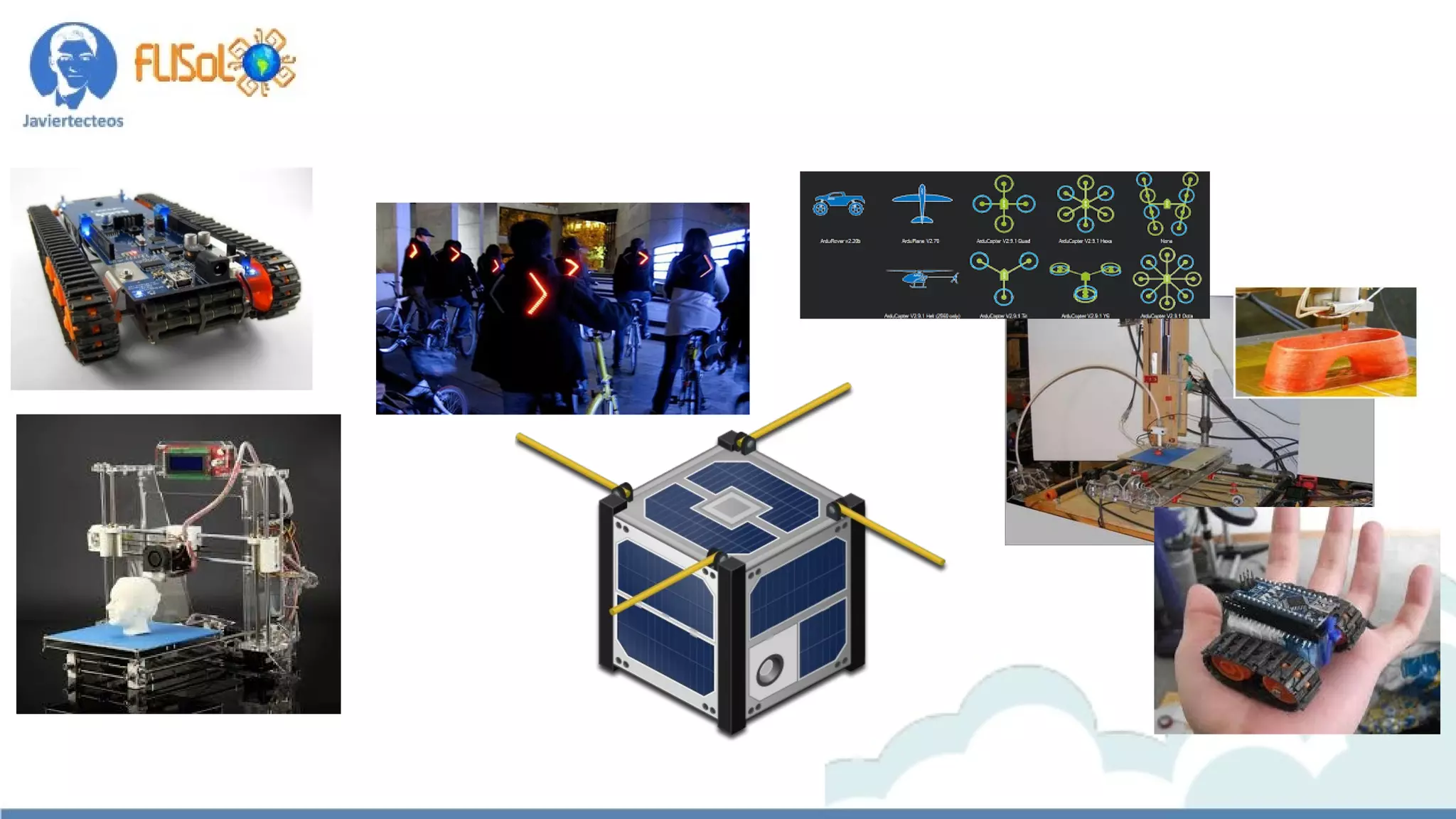
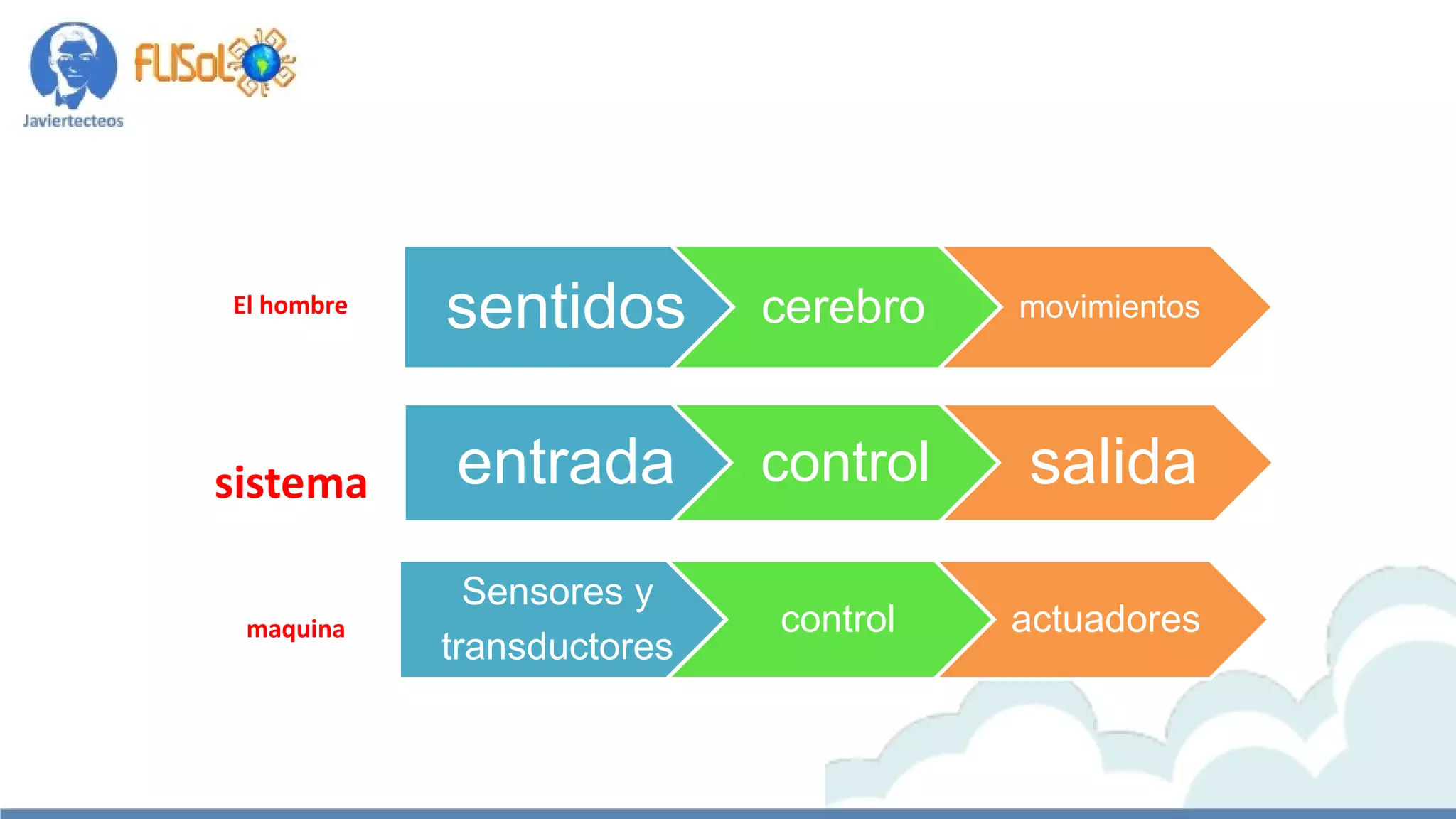
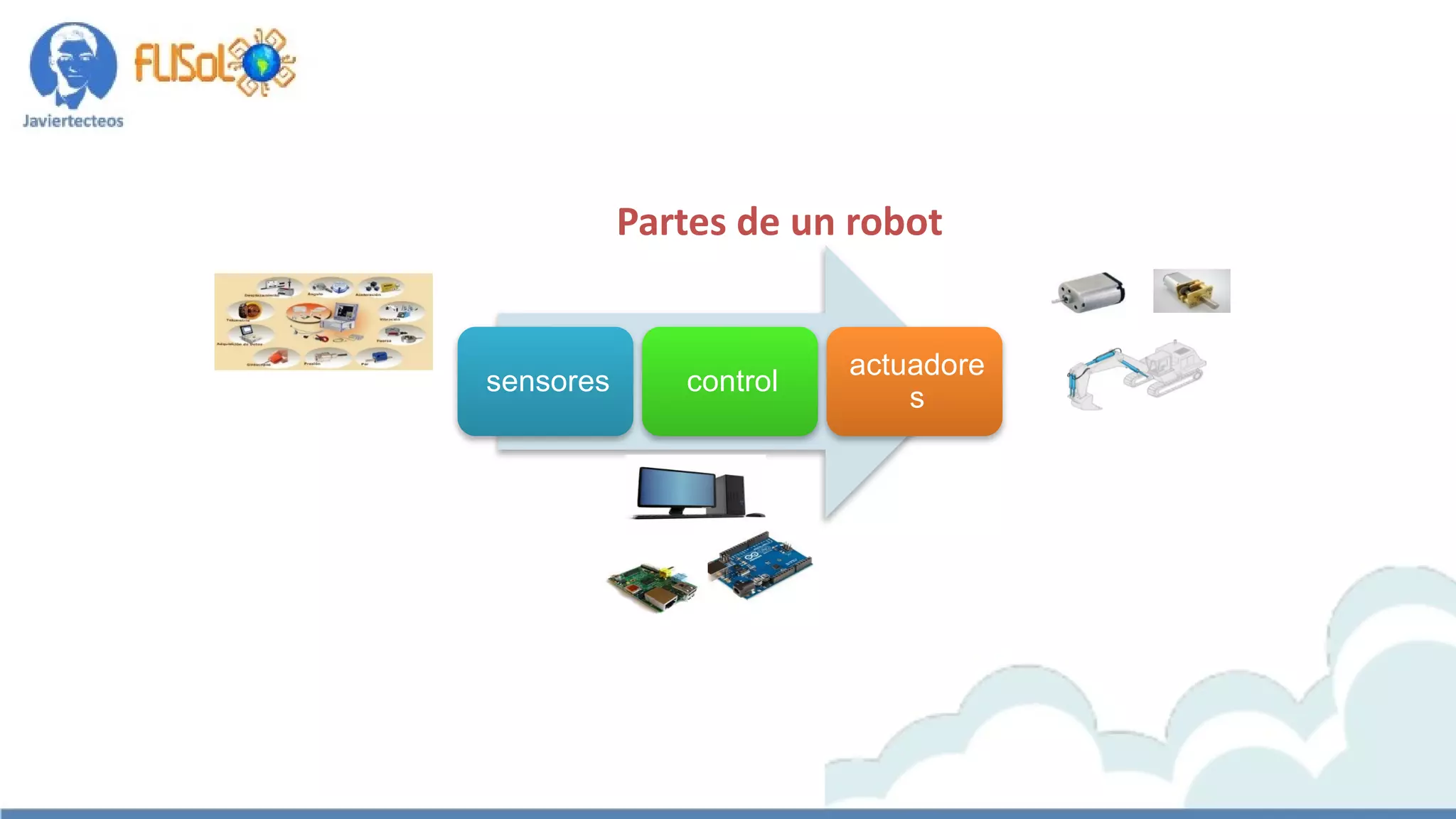

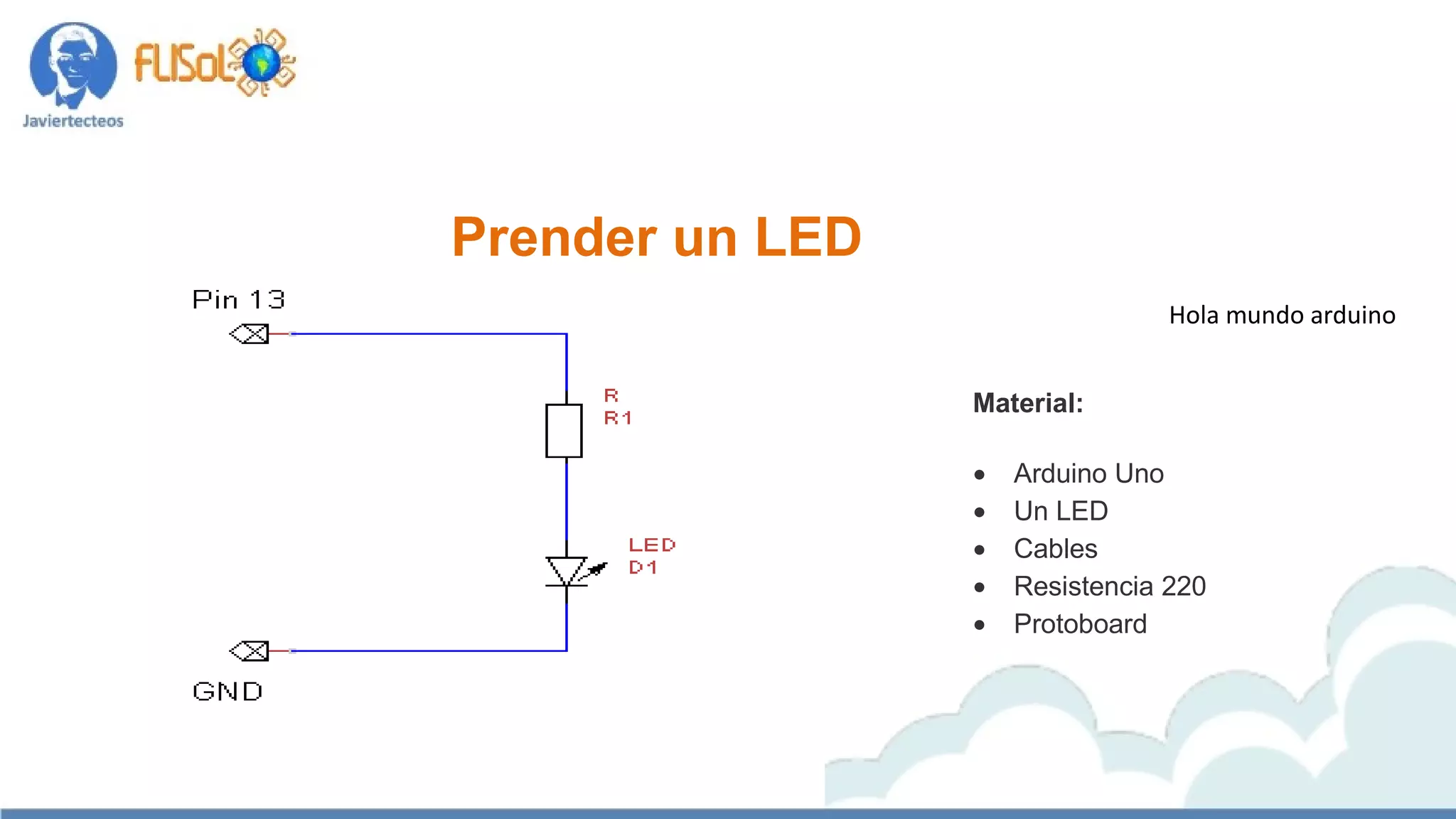
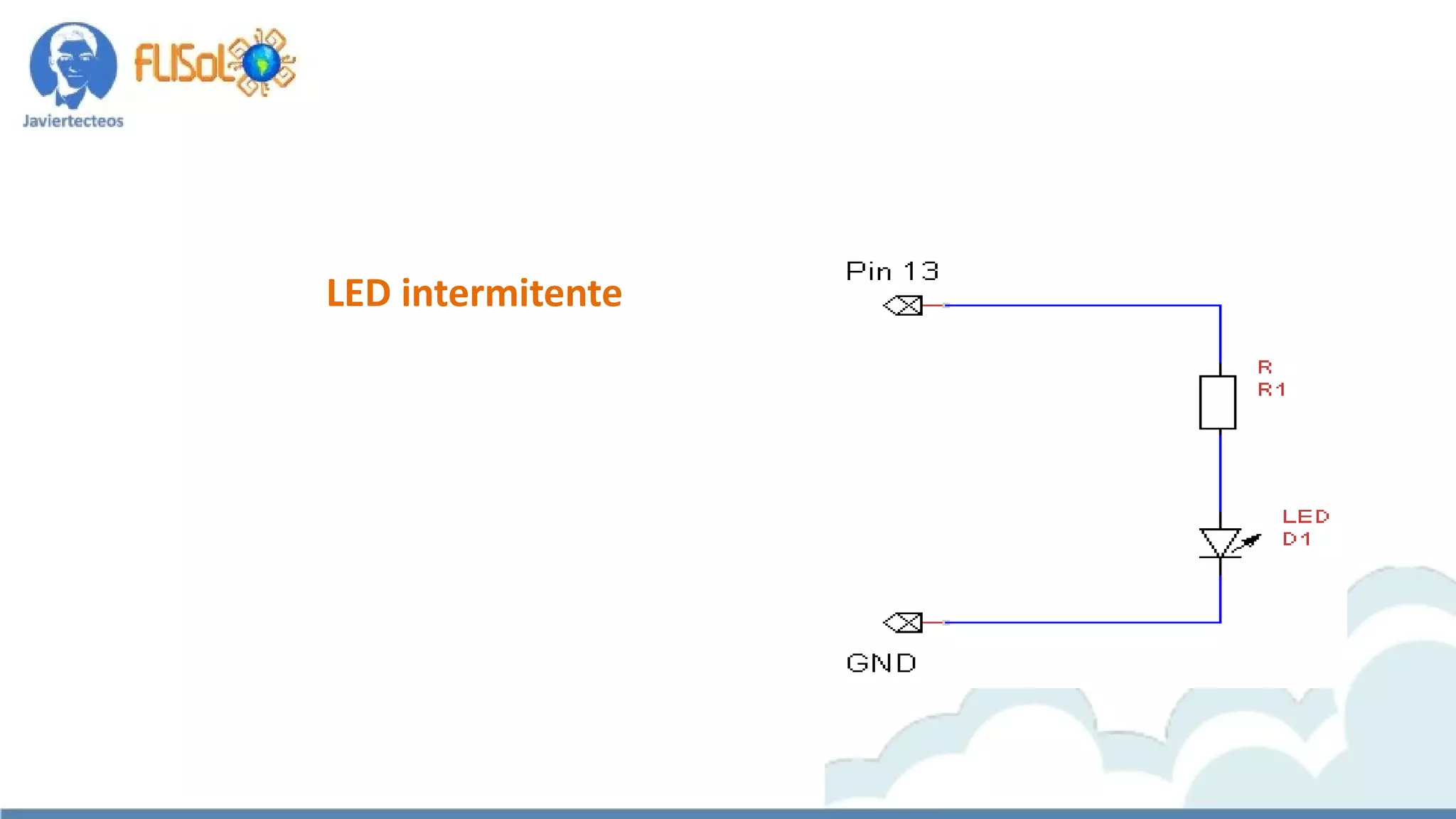

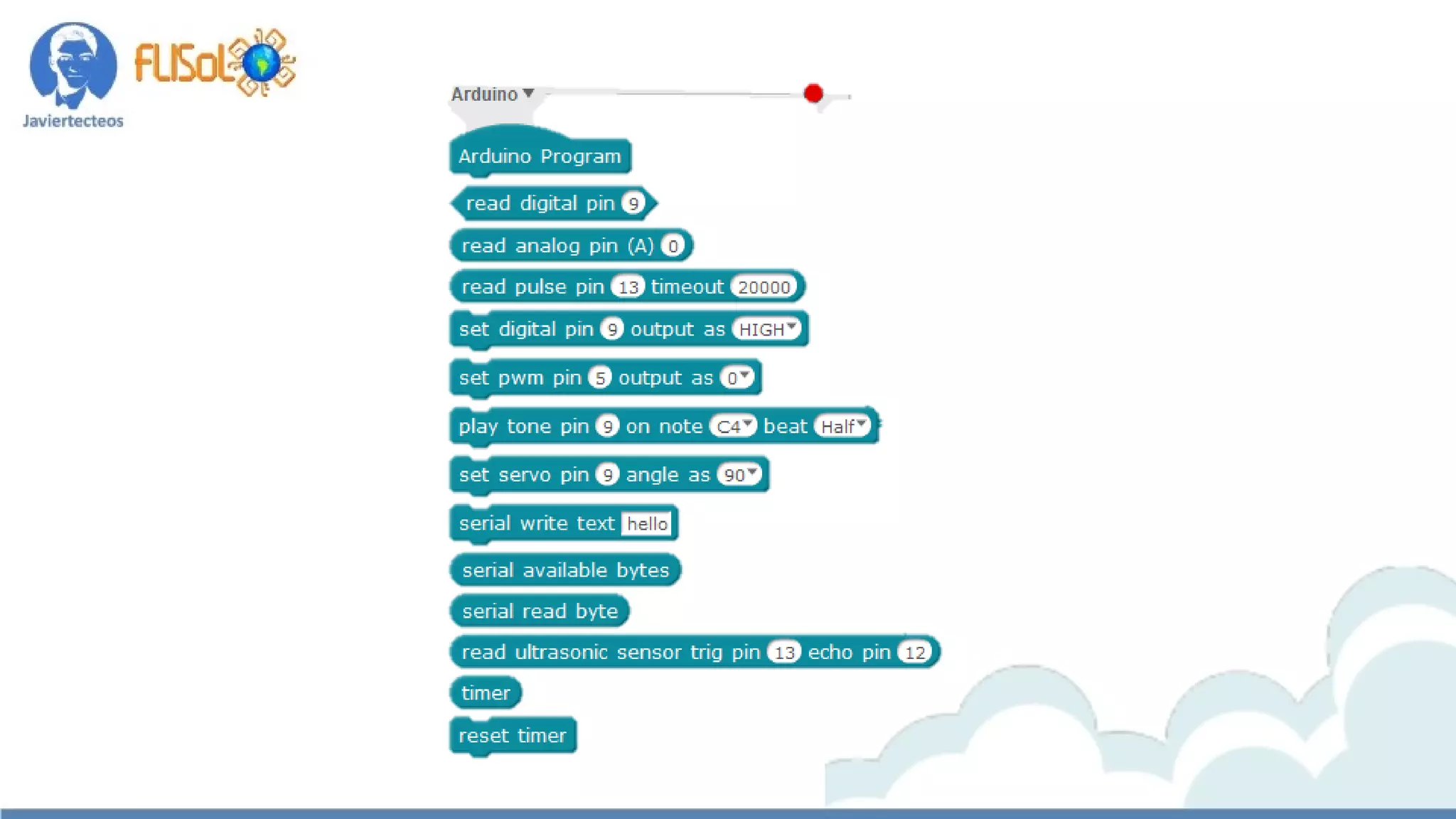
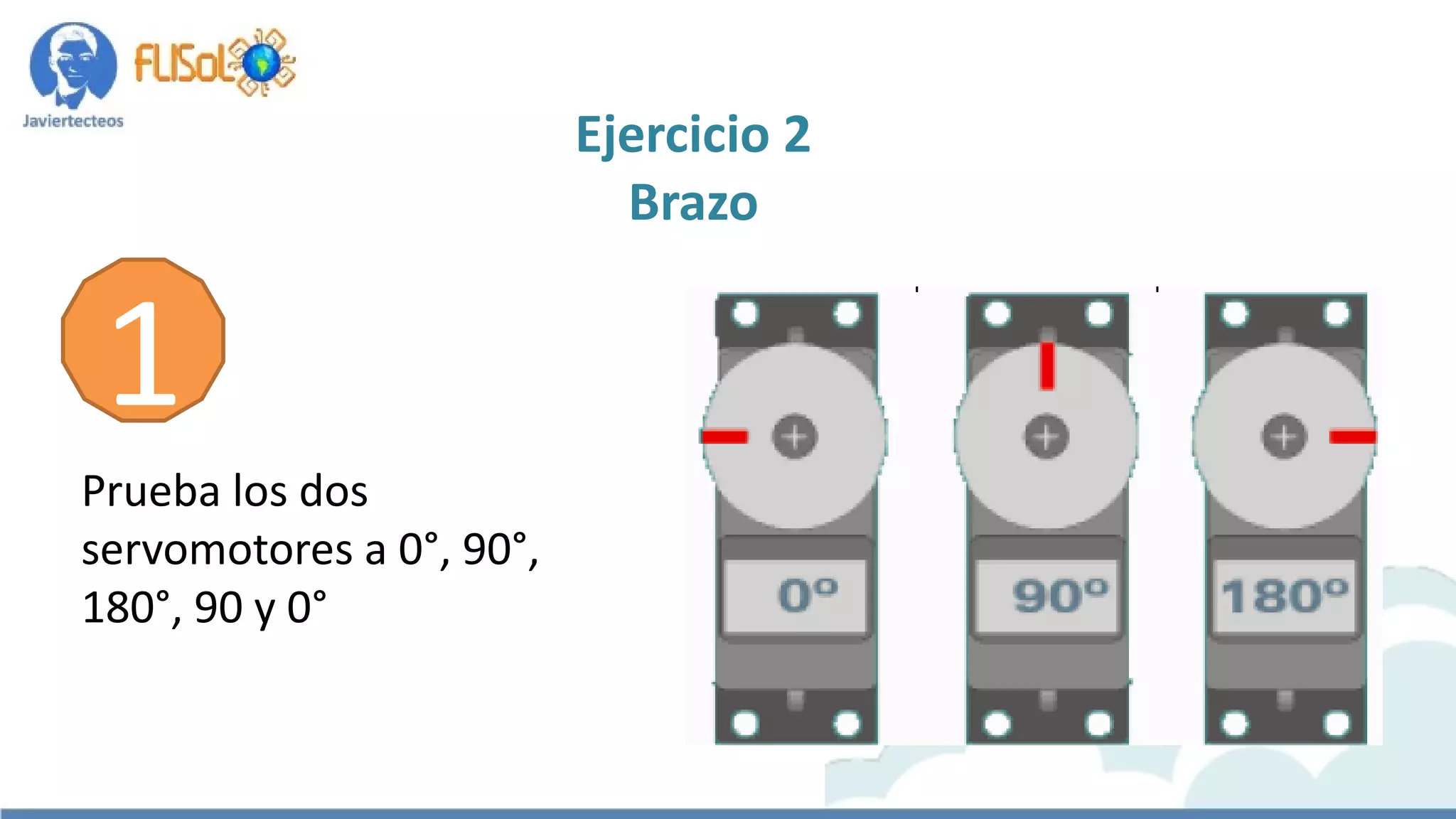
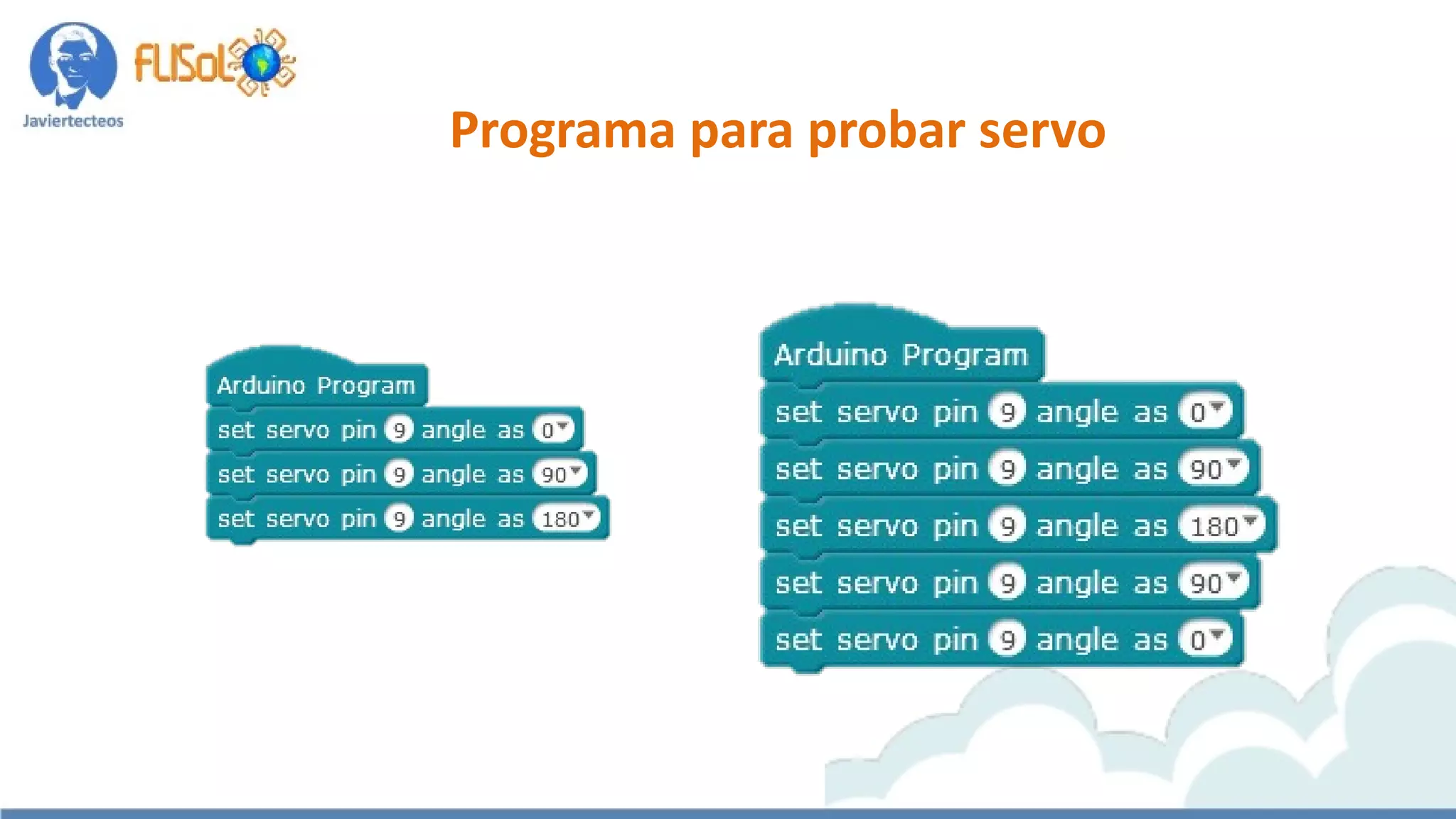
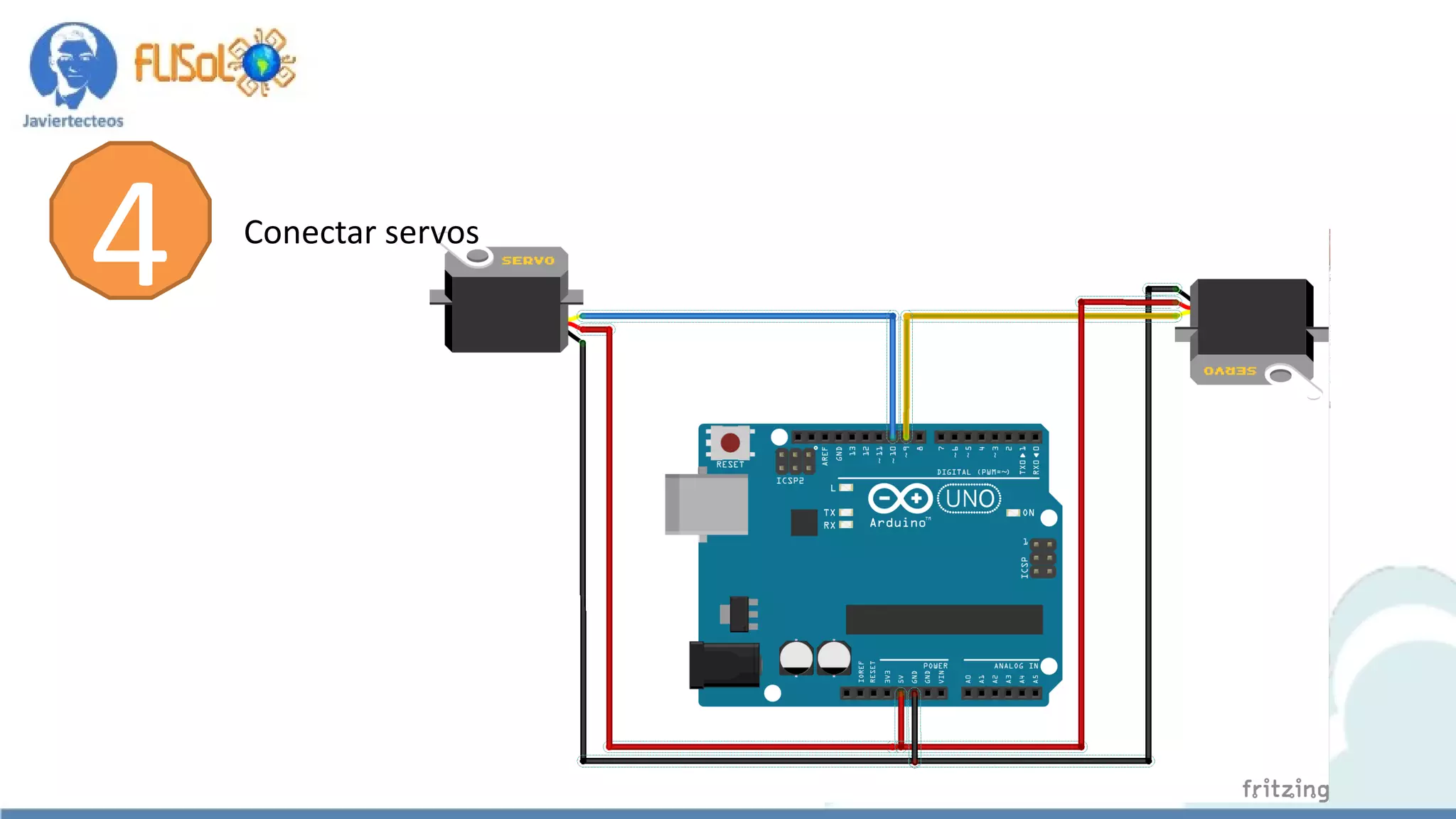
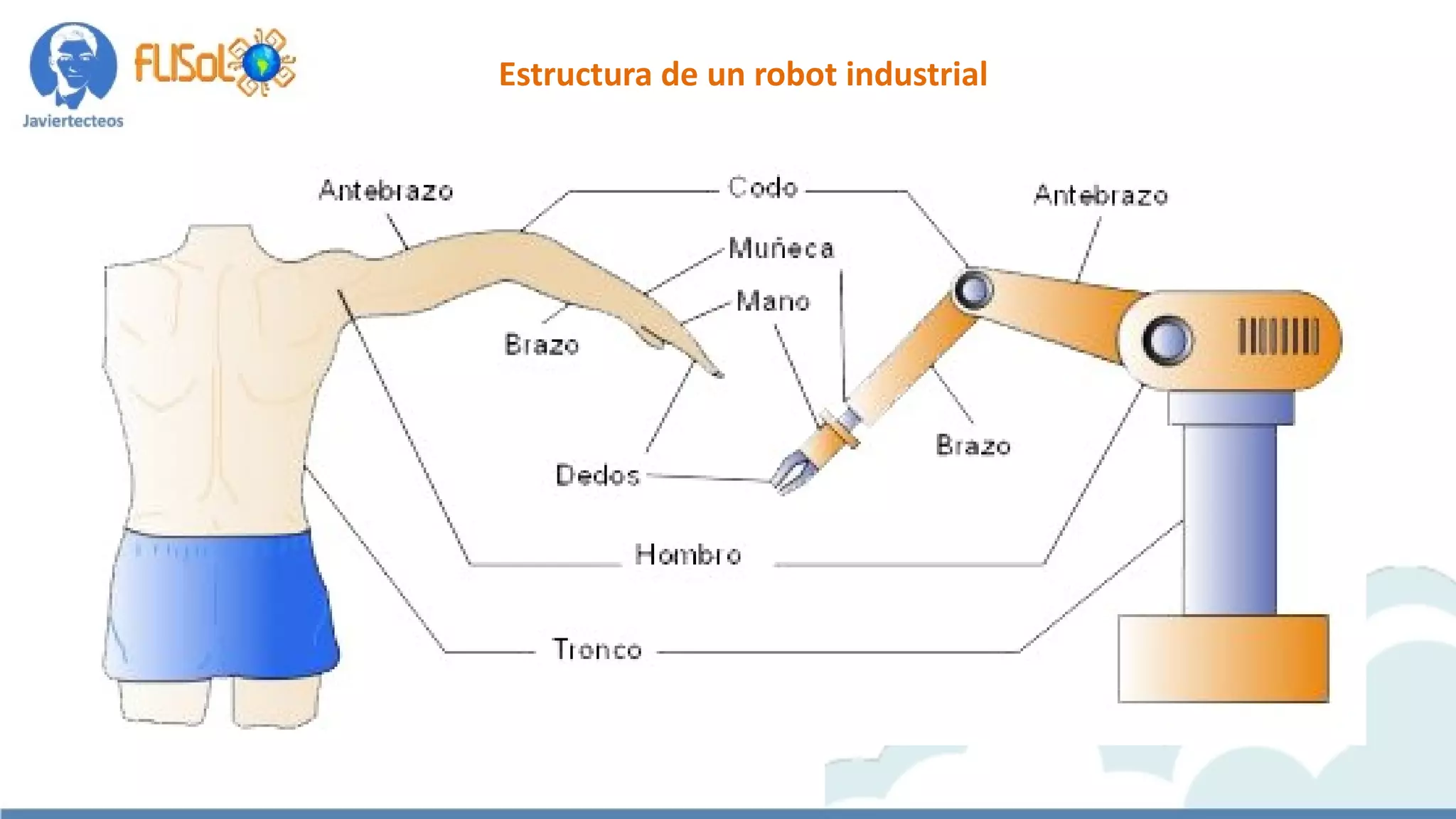
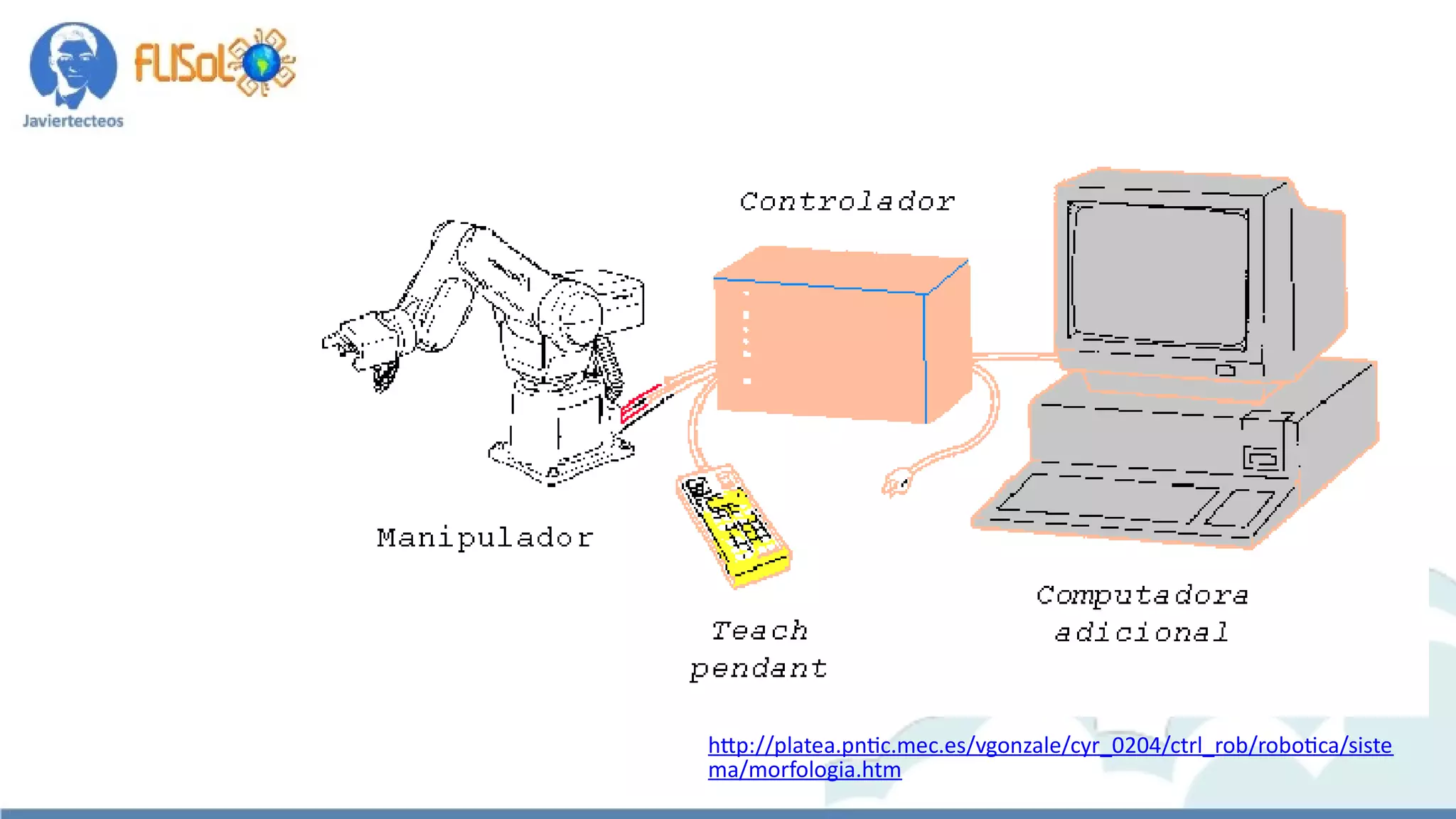
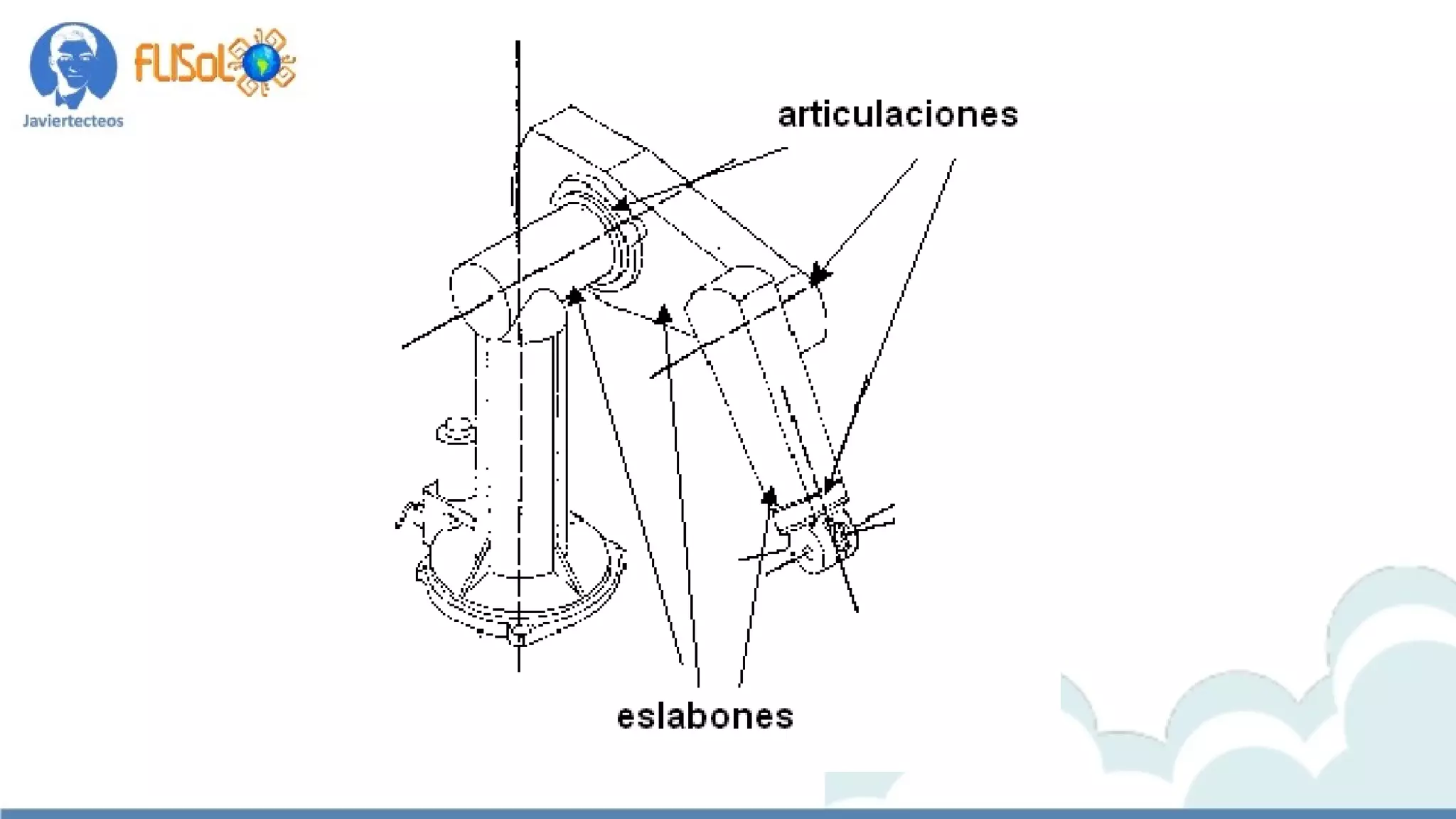



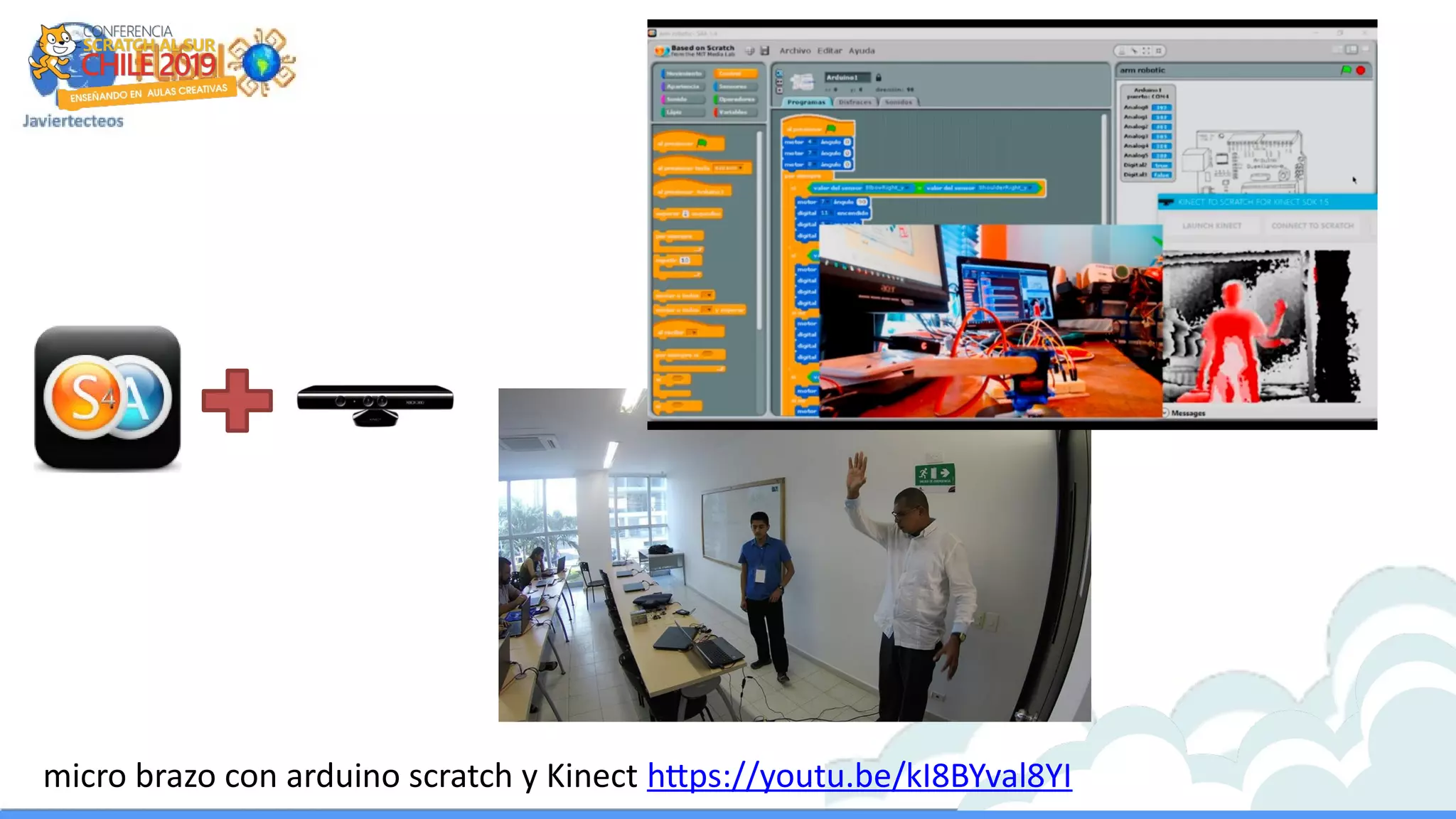




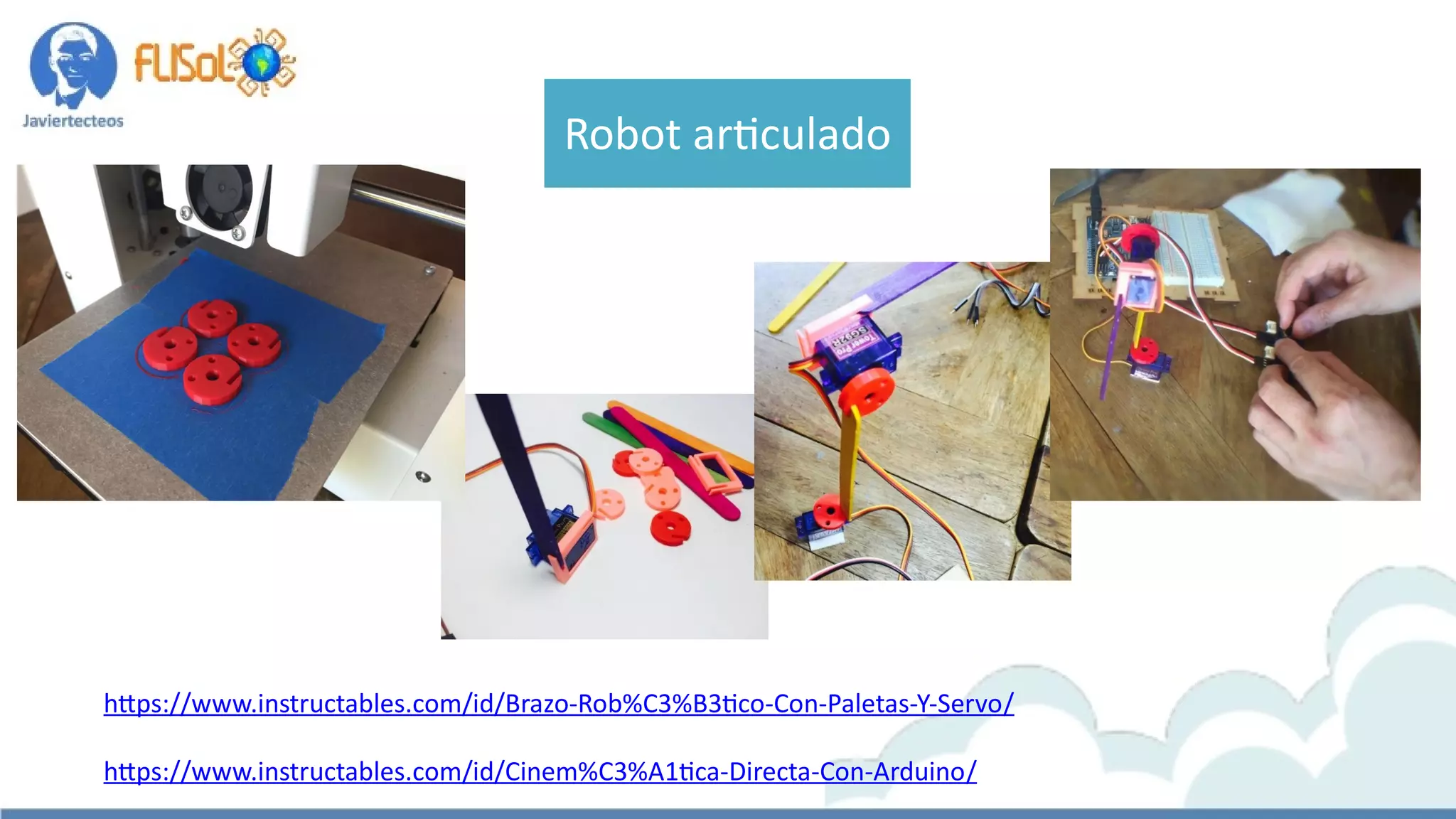


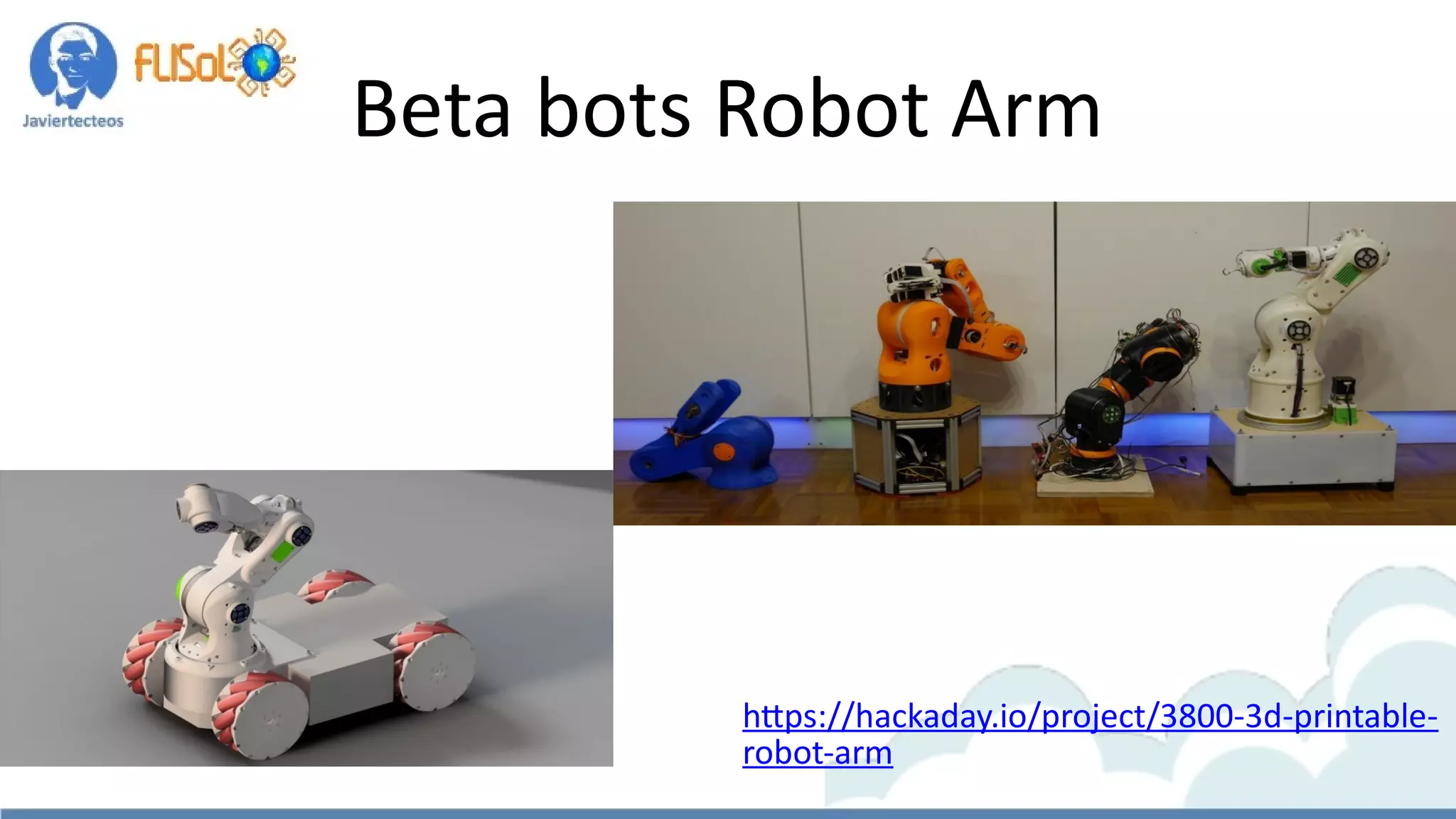
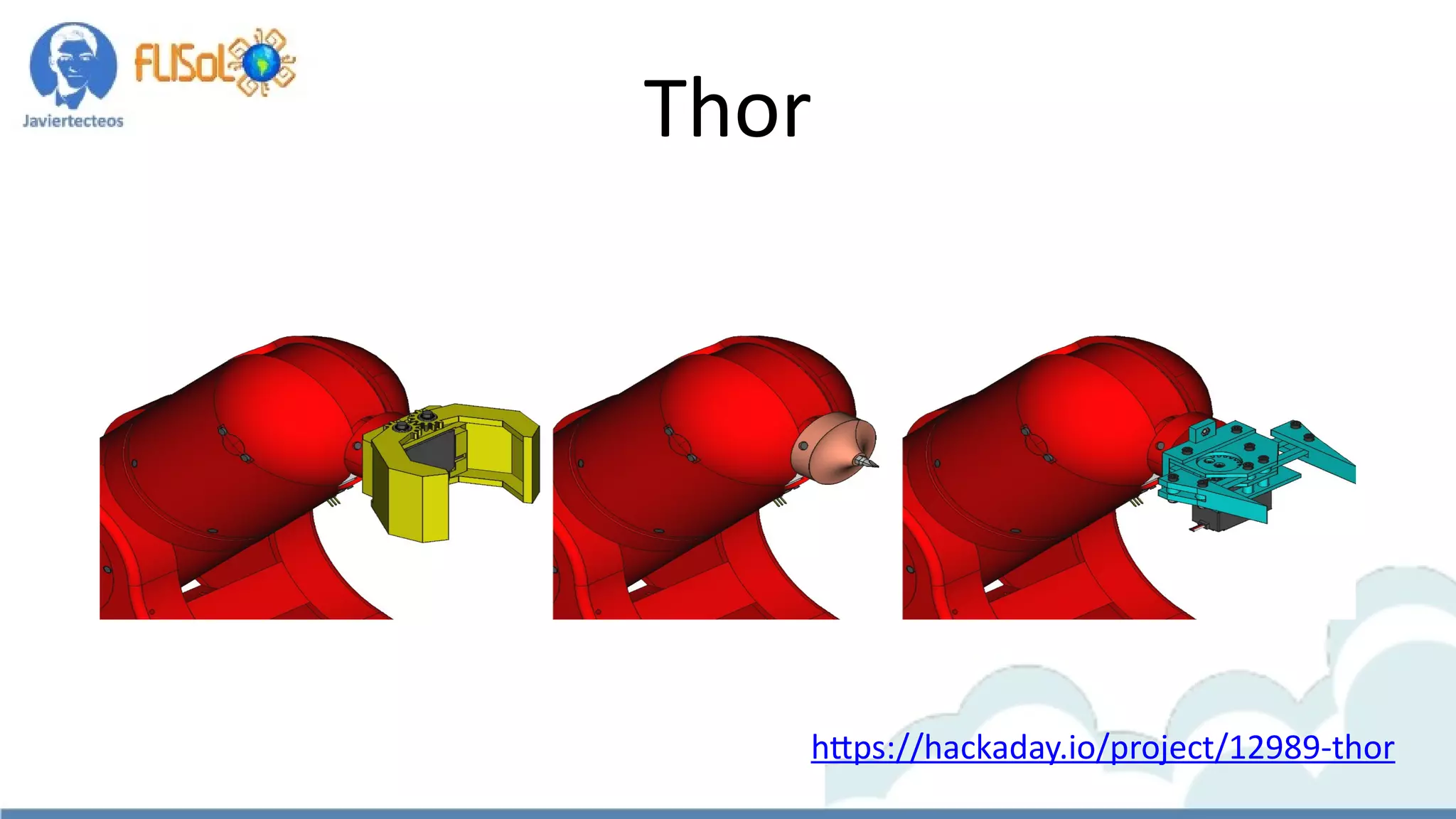






Este documento presenta un taller para construir y programar un brazo robótico de bajo costo con Arduino y Scratch. El taller tiene como objetivos que los participantes construyan un brazo robótico, lo programen y reconozcan la importancia de la programación y robótica industrial en la escuela. El documento describe la actividad y los materiales necesarios, e incluye ejemplos de código y diagramas para explicar conceptos como Arduino, Scratch, servomotores y el espacio de trabajo de un robot.













![Proyecto_Brazo_Robotico_Industrial[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/proyectobrazoroboticoindustrial1-241109233059-95a121ba-thumbnail.jpg?width=640&height=640&fit=bounds)





















































