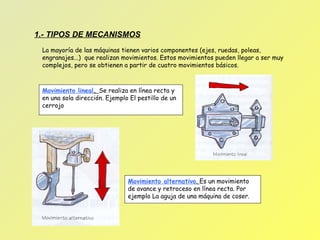
Este documento describe los diferentes tipos de mecanismos y sistemas de transmisión que se utilizan comúnmente en máquinas. Explica los cuatro movimientos básicos (lineal, alternativo, rotativo y oscilante) y los principales mecanismos de transmisión como engranajes, cadena y piñones, y poleas y correas. También describe varios sistemas de transformación de movimiento como biela-manivela, cigüeñal, tornillo, piñón y cremallera, y palanca.