Descargado 12 veces

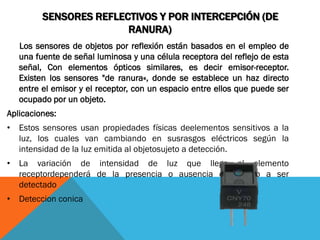
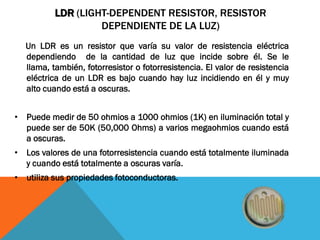
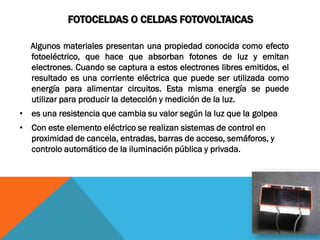












Este documento describe diferentes tipos de sensores utilizados en robótica, incluyendo sensores de luz como fotodiodos, fotoceldas y fotorresistencias; sensores de distancia como ultrasonidos e infrarrojos; sensores de movimiento como acelerómetros y giróscopos; y sensores de temperatura como termopares, termistores y RTD. Explica brevemente el funcionamiento y aplicaciones de cada sensor.















































