Descargado 70 veces



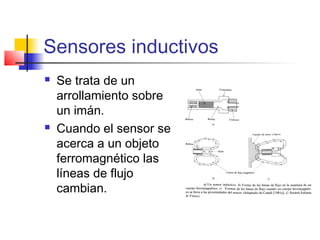
















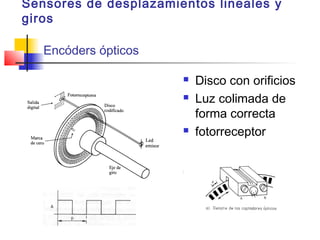



















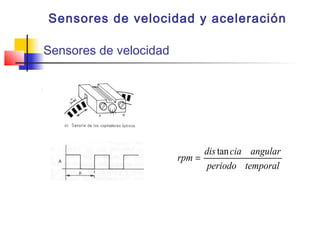


Este documento describe diferentes tipos de sensores utilizados en robots. Explica que los sensores captan señales del entorno y las convierten a señales eléctricas para su procesamiento. Luego describe sensores de proximidad, inductivos, de efecto Hall, capacitivos y ultrasónicos. Finalmente, explica sensores de tacto, luz, desplazamiento, fuerza y aceleración.































































































