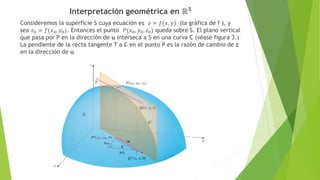
1) El documento introduce el concepto de derivada direccional, que representa la variación de una función cuando su argumento varía en una dirección dada. 2) Se define formalmente la derivada direccional como el límite de la variación de la función entre dos puntos dividido por la distancia entre esos puntos a medida que la distancia tiende a cero. 3) Se muestran ejemplos del cálculo de derivadas direccionales en R2 y R3 y su relación con las derivadas parciales.