
Recomendados
Más contenido relacionado
Similar a Jaiba remadora: anatomía y locomoción
Similar a Jaiba remadora: anatomía y locomoción (20)
Más de ursanrhem
Más de ursanrhem (12)
Último
Último (20)
Jaiba remadora: anatomía y locomoción
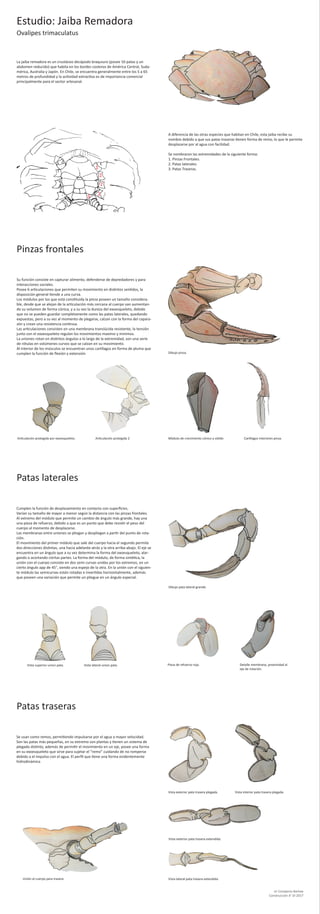
- 1. Estudio: Jaiba Remadora Pinzas frontales Patas laterales Patas traseras 1 2 2 2 3 A diferencia de las otras especies que habitan en Chile, esta jaiba recibe su nombre debido a que sus patas traseras tienen forma de remo, lo que le permite desplazarse por al agua con facilidad. Se nombraron las extremidades de la siguiente forma: 1. Pinzas Frontales. 2. Patas laterales. 3. Patas Traseras. La jaiba remadora es un crustáceo decápodo braquiuro (posee 10 patas y un abdomen reducido) que habita en los bordes costeros de América Central, Suda- mérica, Australia y Japón. En Chile, se encuentra generalmente entre los 5 a 65 metros de profundidad y la actividad extractiva es de importancia comercial principalmente para el sector artesanal. Su función consiste en capturar alimento, defenderse de depredadores y para interacciones sociales. Posee 6 articulaciones que permiten su movimiento en distintos sentidos, la disposición general tiende a una curva. Los módulos por los que está constituida la pinza poseen un tamaño considera- ble, desde que se alejan de la articulación más cercana al cuerpo van aumentan- do su volumen de forma cónica, y a su vez la dureza del exoesqueleto, debido que no se pueden guardar completamente como las patas laterales, quedando expuestas, pero a su vez al momento de plegarse, calzan con la forma del capara- zón y crean una resistencia continua. Las articulaciones consisten en una membrana translúcida resistente, la tensión junto con el exoesqueleto regulan los movimientos maximo y minimos. La uniones rotan en distintos ángulos a lo largo de la extremidad, son una serie de rótulas en volúmenes curvos que se calzan en su movimiento. Al interior de los músculos se encuentran unos cartílagos en forma de pluma que cumplen la función de flexión y extensión Se usan como remos, permitiendo impulsarse por el agua a mayor velocidad. Son las patas más pequeñas, en su extremo son plantas y tienen un sistema de plegado distinto, además de permitir el movimiento en un eje, posee una forma en su exoesqueleto que sirve para sujetar el “remo” cuidando de no romperse debido a el impulso con el agua. El perfil que tiene una forma evidentemente hidrodinámica Cumplen la función de desplazamiento en contacto con superficies. Varían su tamaño de mayor a menor según la distancia con las pinzas frontales. Al extremo del módulo que permite un cambio de ángulo más grande, hay una una pieza de refuerzo, debido a que es un punto que debe resistir el peso del cuerpo al momento de desplazarse. Las membranas entre uniones se pliegan y despliegan a partir del punto de rota- ción. El movimiento del primer módulo que sale del cuerpo hacia el segundo permite dos direcciones distintas, una hacia adelante-atrás y la otra arriba-abajo. El eje se encuentra en un ángulo que a su vez determina la forma del exoesqueleto, alar- gando o acortando ciertas partes. La forma del módulo, de forma sintética, la unión con el cuerpo consiste en dos semi curvas unidas por los extremos, en un cierto ángulo app de 45°, siendo una espejo de la otra. En la unión con el siguien- te módulo las semicurvas están rotadas e invertidas horizontalmente, además que poseen una variación que permite un pliegue en un ángulo especial. Ovalipes trimaculatus Vista exterior pata trasera plegada. Vista interior pata trasera plegada. Vista exterior pata trasera extendida. Vista lateral pata trasera extendida.Unión al cuerpo para trasera. Vista superior union pata. Vista lateral union pata. Pieza de refuerzo roja. Detalle membrana, proximidad al eje de rotación. Dibujo pata lateral grande. Dibujo pinza. Articulación protegida por exoesqueleto. Articulación protegida 2 Módulo de crecimiento cónico y sólido Cartílagos interiores pinza. Ur Conejeros Barlow Construcción 4° DI 2017