Este documento presenta dos problemas relacionados con el modelado y control de sistemas. El primer problema involucra modelar un bote mediante un diagrama de bloques y probar un lazo de control cerrado simple. El segundo problema propone agregar un controlador PID a un circuito eléctrico y modelar el sistema completo. Se pide determinar funciones de transferencia y respuestas temporales para ambos problemas usando MATLAB.
1. Universidad Simón Bolívar.
Departamento de Procesos y Automática
Tarea 1
PS2322 – Sistemas de Control 1
Prof: William Colmenares Abril – Julio 2009
Preparador: Damian Vigouroux 05/06/2009
Resumen
La presente tarea guía al estudiante a través de los desafíos que presenta el modelado y control
de ciertos sistemas, desde una perspectiva introductoria al curso PS2322.
Recordatorio
Incluya TODOS los gráficos, simulaciones en MATLAB, y razonamientos que utilice para obtener
sus resultados. De esto depende su evaluación.
Problema 1
Modelo Mecánico – Diagrama de Bloques – Primera aproximación a Control a lazo Cerrado
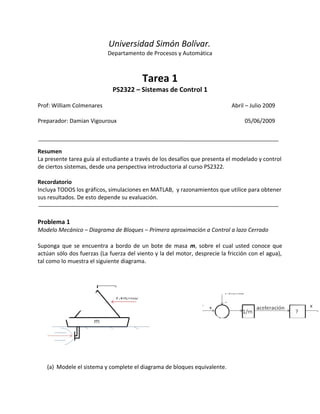
Suponga que se encuentra a bordo de un bote de masa m, sobre el cual usted conoce que
actúan sólo dos fuerzas (La fuerza del viento y la del motor, desprecie la fricción con el agua),
tal como lo muestra el siguiente diagrama.
(a) Modele el sistema y complete el diagrama de bloques equivalente.
2. (b) ¿Es este un sistema a lazo abierto o a lazo cerrado?
Para las siguientes preguntas desprecie el efecto de F.viento y tome A/m = .
Imagine que desea controlar el sistema anterior, y propone el siguiente lazo de control:
(a) Halle la función de transferencia entre Xout y Xref suponiendo que los bloques
identificados como: Transductor (circuito electrónico), Actuador (motor del barco) y
Sensor ( GPS ) son ideales (i.e Pueden ser reemplazados por un cable, ganancia 1) ya
que sólo se incluyen por consistencia en las unidades de las señales.
(b) Suponga que quiere probar el sistema que diseñó, por lo que decide llevar al bote desde
su posición inicial en Xref = 0 hasta Xref = 1. Halle la respuesta temporal del sistema y
responda: ¿Se logra estabilizar el barco en la posición Xref = 1 deseada ? Comente.
Problema 2
Modelado Eléctrico (op-amps, capacitores, etc.) – Función de Transferencia – Introducción a la
noción de Controlador- Respuesta temporal
Suponga que luego de un par de horas en el bote anterior comienza a marearse y decide
mejorar su sistema de control, por lo que acude a su preparador en busca de ayuda. Este le
sugiere agregar un bloque de control justo después de Ve, como lo muestra la siguiente figura.
En donde: C(s) = 0.63(s+1)
3. Debido a que usted siempre sale preparado, con su caja de herramientas, propone
implementar dicho controlador de la siguiente manera:
(a) En el circuito anterior, ¿Cuáles son los elementos que almacenan energía y que variable
de estado les asociaría? Modele el sistema.
(b) Halle la función de transferencia Vcontrol/Verror
(c) Halle la relación Rpot/R y el producto RC que permitan obtener
Vcontrol/Verror=0.63(s+1)
(d) Halle la respuesta del sistema ante una entrada tipo escalón y compárela con la
respuesta sin controlador (Parte b. problema 1). Comente al respecto.
MATLAB: Se recomienda revisar la sección de códigos de MATLAB en la página web de la
materia, en particular: Para generación de Respuesta Temporal.
http://sites.google.com/site/cursoswilliamcolmenares/ps2322/codigos-matlab