
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (19)
Similar a Enunciado Feedback1
Similar a Enunciado Feedback1 (20)
Enunciado Feedback1
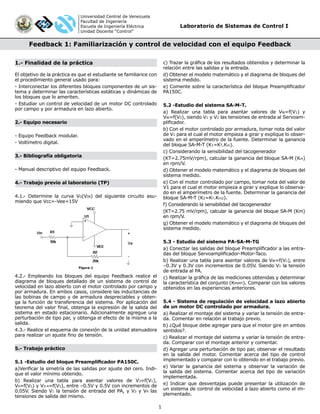
- 1. Universidad Central de Venezuela Facultad de Ingeniería Escuela de Ingeniería Eléctrica Unidad Docente “Control” 1 Laboratorio de Sistemas de Control I Feedback 1: Familiarización y control de velocidad con el equipo Feedback 1.- Finalidad de la práctica El objetivo de la práctica es que el estudiante se familiarice con el procedimiento general usado para: - Interconectar los diferentes bloques componentes de un sis- tema y determinar las características estáticas y dinámicas de los bloques que lo ameriten. - Estudiar un control de velocidad de un motor DC controlado por campo y por armadura en lazo abierto. 2.- Equipo necesario - Equipo Feedback modular. - Voltímetro digital. 3.- Bibliografía obligatoria - Manual descriptivo del equipo Feedback. 4.- Trabajo previo al laboratorio (TP) 4.1.- Determine la curva VO(VIN) del siguiente circuito asu- miendo que Vcc=-Vee=15V 4.2.- Empleando los bloques del equipo Feedback realice el diagrama de bloques detallado de un sistema de control de velocidad en lazo abierto con el motor controlado por campo y por armadura. En ambos casos, considere las inductancias de las bobinas de campo y de armadura despreciables y obten- ga la función de transferencia del sistema. Por aplicación del teorema del valor final, obtenga la expresión de la salida del sistema en estado estacionario. Adicionalmente agregue una perturbación de tipo par, y obtenga el efecto de la misma a la salida. 4.3.- Realice el esquema de conexión de la unidad atenuadora para realizar un ajuste fino de tensión. 5.- Trabajo práctico 5.1 -Estudio del bloque Preamplificador PA150C. a)Verificar la simetría de las salidas por ajuste del cero. Indi- que el valor mínimo obtenido. b) Realizar una tabla para asentar valores de V3=f(V1), V4=f(V1) y V3-4=f(V1), entre –0.5V y 0.5V con incrementos de 0.05V. Siendo V1 la tensión de entrada del PA, y V3 y V4 las tensiones de salida del mismo. Figura 1 c) Trazar la gráfica de los resultados obtenidos y determinar la relación entre las salidas y la entrada. d) Obtener el modelo matemático y el diagrama de bloques del sistema medido. e) Comente sobre la característica del bloque Preamplificador PA150C. 5.2 -Estudio del sistema SA-M-T. a) Realizar una tabla para asentar valores de VW=f(V1) y VW=f(V2), siendo V1 y V2 las tensiones de entrada al Servoam- plificador. b) Con el motor controlado por armadura, tomar nota del valor de V1 para el cual el motor empieza a girar y explique lo obser- vado en el amperímetro de la fuente. Determinar la ganancia del bloque SA-M-T (K1=KT.Km). c) Considerando la sensibilidad del tacogenerador (KT=2.75mV/rpm), calcular la ganancia del bloque SA-M (Km) en rpm/V. d) Obtener el modelo matemático y el diagrama de bloques del sistema medido. e) Con el motor controlado por campo, tomar nota del valor de V1 para el cual el motor empieza a girar y explique lo observa- do en el amperímetro de la fuente. Determinar la ganancia del bloque SA-M-T (K2=KT.Km2). f) Considerando la sensibilidad del tacogenerador (KT=2.75 mV/rpm), calcular la ganancia del bloque SA-M (Km) en rpm/V. g) Obtener el modelo matemático y el diagrama de bloques del sistema medido. 5.3 - Estudio del sistema PA-SA-M-TG a) Conectar las salidas del bloque Preamplificador a las entra- das del bloque Servoamplificador-Motor-Taco. b) Realizar una tabla para asentar valores de VW=f(V1), entre –0.3V y 0.3V con incrementos de 0.05V. Siendo V1 la tensión de entrada al PA. c) Realizar la gráfica de las mediciones obtenidas y determinar la característica del conjunto (KPSMT). Comparar con los valores obtenidos en las experiencias anteriores. 5.4 - Sistema de regulación de velocidad a lazo abierto de un motor DC controlado por armadura. a) Realizar el montaje del sistema y variar la tensión de entra- da. Comentar en relación al trabajo previo. b) ¿Qué bloque debe agregar para que el motor gire en ambos sentidos?. c) Realizar el montaje del sistema y variar la tensión de entra- da. Comparar con el montaje anterior y comentar. d) Agregar una perturbación de tipo par, observar el resultado en la salida del motor. Comentar acerca del tipo de control implementado y comparar con lo obtenido en el trabajo previo. e) Variar la ganancia del sistema y observar la variación de la salida del sistema. Comentar acerca del tipo de variación implementada. e) Indicar que desventajas puede presentar la utilización de un sistema de control de velocidad a lazo abierto como el im- plementado.
- 2. Universidad Central de Venezuela Facultad de Ingeniería Escuela de Ingeniería Eléctrica Unidad Docente “Control” 2 Laboratorio de Sistemas de Control I Feedback 1: Familiarización y control de velocidad con el equipo Feedback 5.5 - Sistema de regulación de velocidad a lazo abierto de un motor DC controlado por campo. a) Realizar el montaje del sistema y variar la tensión de entra- da. Comentar en relación al trabajo previo. b) ¿Qué bloque debe agregar para que el motor gire en ambos sentidos?. c) Realizar el montaje del sistema y variar la tensión de entra- da. Comparar con el montaje anterior y comentar. d) Agregar una perturbación de tipo par, observar el resultado en la salida del motor. Comentar acerca del tipo de control implementado y comparar con lo obtenido en el trabajo previo. e) Variar la ganancia del sistema y observar la variación de la salida del sistema. Comentar acerca del tipo de variación implementada. e) Indicar que desventajas puede presentar la utilización de un sistema de control de velocidad a lazo abierto como el im- plementado. f) Comente el efecto de la perturbación tipo par utilizada sobre el sistema de control de velocidad implementado y que cam- bios se pueden esperar si el motor es controlado por campo.