
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (9)
Similar a Cuadro comparativo metodos de busqueda
Similar a Cuadro comparativo metodos de busqueda (20)
Último
Último (19)
Cuadro comparativo metodos de busqueda
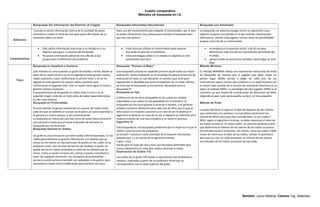
- 1. Cuadro comparativo Métodos de búsqueda en I.A. Nombre: Junior Medina. Carrera: Ing. Sistemas. Búsquedas Sin Información del Dominio (A Ciegas) Búsquedas Informadas (Heurísticas) Búsqueda con Adversario Definición Cuando no existe información acerca de la cantidad de pasos necesarios o sobre el costo de ruta para pasar del estado de un momento dado a la meta. Hace uso del conocimiento para adaptar el solucionador, por lo que se posee información muy valiosa para orientar la búsqueda para que sea más óptima. La búsqueda con adversos (juego contra un oponente) cuyo objetivo es ganar una partida en la que realizan movimientos alternativos. Donde cada jugador conoce tanto las posibilidades propias como las de su contrincante. Características Sólo utiliza información acerca de si un estado es o no objetivo para guiar su proceso de búsqueda. No posee información adicional mas allá de la que proporciona la definición del problema. Estas técnicas utilizan el conocimiento para avanzar buscando la solución al problema. Estas estrategias saben si un estado no objetivo es más prometedor que otro. se empieza en la posición inicial, y de ahí se pasa determinar cada uno de los movimientos permitidos por el juego, genera todas las posiciones posibles, hasta llegar al nivel final. Tipos Búsqueda en Amplitud o Anchura. Este método va construyendo un grafo de estados o árbol, donde se parte de un nodo inicial si no se ha logrado la meta genere nuevos nodos sucesores, estos conformaran el primer nivel, si no se ha logrado la meta genere los nuevos nodos sucesores que conformaran el segundo nivel. Esto se repite hasta lograr la meta o generar nuevos sucesores. El procedimiento de búsqueda se realiza nivel a nivel y no se expande ningún nodo de un nivel antes de haber expandido todos los del nivel anterior. Búsqueda en Profundidad. En este método se genera solamente un sucesor del nodo inicial, cada vez que se obtiene un sucesor se le aplica un nuevo operador y se genera un nuevo sucesor, y así sucesivamente. La búsqueda se realiza por una sola rama del árbol hasta encontrar una solución o hasta que se tome la decisión de terminar la búsqueda por esa dirección. Búsqueda General en Grafos. Un grafo es una estructura que tiene nodos interrelacionados. En los nodos generalmente se guarda información. Los árboles que ya vimos son en efecto un tipo particular de grafos en los cuales no se producen ciclos. Son muchas las formas de modelar un grafo, se puede pensar en nodos enlazados al estilo de los árboles que ya vimos. Como un grafo no tiene raíz, vamos a querer consultarlo a partir de cualquier elemento. Los conceptos de profundidad primero y ancho primero también son aplicables a los grafos, pero necesitamos hacer cierta modificación para eliminar los ciclos. Búsqueda “Primero el Mejor” Esta búsqueda consiste en expandir primero aquél nodo con mejor evaluación. Dicha evaluación es el resultado de aplicar la función de evaluación al nodo, la cual devuelve un número que sirve para representar lo deseable que sería la expansión de un nodo. Dentro de este tipo de búsqueda se encuentran: Búsqueda avara y Búsqueda A*. Búsqueda en Haz A diferencia de las otras búsquedas en las cuales los estados expandidos y sus nodos no son guardados en la memoria, la búsqueda por haz local guarda la pista de K estados, y se generan estados sucesores aleatorios para cada uno de ellos, por lo que se seleccionan los mejores sucesores y en caso de ser el objetivo el algoritmo se detiene, en caso de no ser el objetivo se selección los K mejores estados de una lista completa y se repite el proceso. Algoritmo A* Esta búsqueda es una búsqueda preferente por lo mejor en la que se utiliza f como función de evaluación. La función f calcula el costo estimado de la solución más barata, pasando por n y se calcula de la siguiente manera: f=g(n) + h(n) Siendo g(n) el costo de ruta y h(n) una heurística admisible (que nunca sobreestima el costo que implica alcanzar la meta). Exploración de Grafos Y/O Los nodos de un grafo Y/O vienen a representar sub-problemas a resolver, originados a partir de un problema inicial que se correspondería con el nodo superior del grafo. Método Minimax El método MINIMAX realiza una exploración exhaustiva del árbol de búsqueda, de manera que el jugador que debe mover en primer lugar (MAX) tiende a elegir en cada uno de sus movimientos aquel camino que conduzca a un nodo frontera con el mayor valor posible de la función de evaluación heurístca (si se aplica el método MAX). La estrategia del otro jugador (MIN) es la contraria, ya que tratará de contrarrestar las decisiones de MAX, eligiendo el peor valor para aquella, es decir, el más pequeño. Método de Poda La poda Alfa-Beta se basa en la idea de disponer de dos valores que conforman una ventana a la cual deben pertenecer los valores de fev(n) para que sean considerados. En los nodos n MAX, según el algoritmo minimax, se debe maximizar el valor de los nodos sucesores. En estos nodos, se utiliza el parámetro α(n) que determina el máximo de los valores de los nodos sucesores encontrado hasta el momento. Así mismo, como los nodos n MIN tratan de minimizar el valor de los nodos, utilizan el parámetro α(n) que va a ser, en cada momento, el mínimo de los valores encontrados de los nodos sucesores de ese nodo.