
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Búsquedas en Inteligencia Artificial: Búsqueda en profundidad, heurística y adversario
Similar a Búsquedas en Inteligencia Artificial: Búsqueda en profundidad, heurística y adversario (20)
Último
Último (20)
Búsquedas en Inteligencia Artificial: Búsqueda en profundidad, heurística y adversario
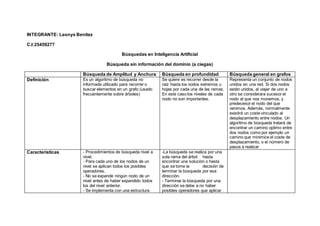
- 1. INTEGRANTE: Leonys Benitez C.I:25459277 Búsquedas en Inteligencia Artificial Búsqueda sin información del dominio (a ciegas) Búsqueda de Amplitud y Anchura Búsqueda en profundidad Búsqueda general en grafos Definición Es un algoritmo de búsqueda no informada utilizado para recorrer o buscar elementos en un grafo (usado frecuentemente sobre árboles) Se quiere es recorrer desde la raíz hasta los nodos extremos u hojas por cada una de las ramas. En este caso los niveles de cada nodo no son importantes. Representa un conjunto de nodos unidos en una red. Si dos nodos están unidos, al viajar de uno a otro se considerara sucesor el nodo al que nos movemos, y predecesor el nodo del que venimos. Además, normalmente existirá un coste vinculado al desplazamiento entre nodos. Un algoritmo de búsqueda tratará de encontrar un camino optimo entre dos nodos como por ejemplo un camino que minimice el coste de desplazamiento, o el número de pasos a realizar Características - Procedimientos de búsqueda nivel a nivel. - Para cada uno de los nodos de un nivel se aplican todos los posibles operadores. - No se expande ningún nodo de un nivel antes de haber expandido todos los del nivel anterior. - Se implementa con una estructura -La búsqueda se realiza por una sola rama del árbol hasta encontrar una solución o hasta que se tome la decisión de terminar la búsqueda por esa dirección. - Terminar la búsqueda por una dirección se debe a no haber posibles operadores que aplicar
- 2. FIFO. sobre el nodo hoja o por haber alcanzado un nivel de profundidad muy grande. - Si esto ocurre se produce una vuelta atrás (backtracking) y se sigue por otra rama hasta visitar todas las ramas del árbol si es necesario. Aplicación Se comienza en la raíz (eligiendo algún nodo como elemento raíz en el caso de un grafo) y se exploran todos los vecinos de este nodo. A continuación para cada uno de los vecinos se exploran sus respectivos vecinos adyacentes, y así hasta que se recorra todo el árbol Se aplica de forma recursiva, de lo contrario tendríamos que usar en lugar de una cola una pila, pero con la recursión nos ahorramos la necesidad de utilizar esta estructura explícitamente y en lugar de ello nos valemos de la pila de recursión. En muchas aplicaciones es necesario visitar todos los vértices del grafo a partir de un nodo dado. Algunas aplicaciones son: Encontrar ciclos Encontrar componentes conexas Encontrar árboles cobertores Ventajas Si existe la solución, la encuentra en la menor profundidad posible Tiene menor complejidad espacial que búsqueda en amplitud. Se puede determinar en un tiempo fijo y constante si un enlace(arco) pertenece o no al grafo. Es fácil determinar si existe o no un arco o enlace, solo se debe posicionar en la matriz. Es fácil determinar si existe un ciclo en el grafo, basta multiplicar la matriz por ella misma n veces hasta obtener la matriz nula(no hay ciclos) o bien una sucesión periódica de matrices(hay ciclo) Desventajas -Explosión combinatoria aparece frecuentemente debido a la alta -Se pueden encontrar soluciones que están más alejadas de la Se requiere un almacenamiento |v|*|v|. Es decir O(n2).
- 3. complejidad espacial y temporal de esta técnica. raíz que otras. - Existe el riesgo de presencia de bucles infinitos. Solo al leer o examinar la matriz puede llevar un tiempo de O(n2). Algoritmo asociado Sea G=(V,A) un grafo conexo; V´=V un conjunto de vértices, A` un vector vació y P un vector de arcos inicialmente vació y P un vector auxiliar inicialmente vació: Se introduce el vértice inicial en P y se elimina del conjunto Mientras V` no sea vació repetir los puntos 3 y 4. En otro caso parar. Se toma el primer elemento P como vértice del activo Si el vértice activo tienen algún vértice adyacente que se encuentre en V`: Se toma el de menor índice Se inserta en P como último elemento Se elimina de V Se inserta en A` el arco que le une con el vértice activo Si el vértice activo no tiene adyacentes se elimina de P. Sea G=(V,A) un grafo conexo; V´=V un conjunto de vértices, A` un vector vació y P un vector de arcos inicialmente vació y P un vector auxiliar inicialmente vació: Se introduce el vértice inicial en P y se elimina del conjunto Mientras V` no sea vació repetir los puntos 3 y 4. En otro caso parar. Se toma el primer elemento P como vértice del activo Si el vértice activo tienen algún vértice adyacente que se encuentre en V`: Se toma el de menor índice Se inserta en P como último elemento Se elimina de V Se inserta en A` el arco que le une con el vértice activo Si el vértice activo no tiene adyacentes se elimina de P. - Abiertos:= (nodo_inicial); Resuelto:= FALSO; - Mientras que abierto no es vacia y NO. RESUELTO - N:= quitar elementos abiertos.
- 4. Búsqueda Heurística Búsqueda “Primero el mejor” Búsqueda en Haz Algoritmo A* Definición Elegir como siguiente nodo aquel con mayor función de evaluación. Elegir un conjunto de nodos como los siguientes a expandir, y hacerlo de forma irrevocable. Ponderar a la vez lo cerca que estamos del nodo meta y lo lejos que estamos del nodo inicial. Características Analizar preferentemente los nodos con heurística más baja. Ordenar la cola de abiertos por heurística, de menor a mayor Guardar sólo un nodo en memoria puede parecer una reacción extrema al problema de limitación de memoria. En su forma más simple, puede sufrir una carencia de diversidad entre los k estados (concentrados en una pequeña región del espacio de estados) y volverse en poco más que una versión cara de la AdC. Se clasifica dentro de los algoritmos de búsqueda en grafos. El algoritmo A* encuentra, siempre y cuando se cumplan unas determinadas condiciones. el camino de menor coste entre un nodo origen y uno objetivo Aplicación Nodo de búsqueda: estado + camino + heurística Funciones de acceso: ESTADO(NODO), CAMINO(NODO) y HEURISTICA-DEL- NODO(nodo) Comienza con k estados generados aleatoriamente. – En cada paso se generan todos los sucesores de los k estados. – Se comprueba si alguno es un objetivo. – Si no, se seleccionan los k mejores sucesores de la lista completa y se repite el proceso. Este algoritmo utiliza una función de evaluación f(n) = g(n) + h'(n), donde h'(n) representa el valor heurístico del nodo a evaluar desde el actual, n, hasta el final, y g(n), el costo real del camino recorrido para llegar a dicho nodo, n. A* mantiene dos estructuras de datos auxiliares, que podemos denominar abiertos, implementado como una cola de prioridad ordenada por el valor f(n) de cada nodo, y cerrados, donde se guarda la información de los
- 5. nodos que ya han sido visitados. En cada paso del algoritmo, se expande el nodo que esté primero en abiertos, y en caso de que no sea un nodo objetivo, calcula la f(n) de todos sus hijos, los inserta en abiertos, y pasa el nodo evaluado a cerrados. Ventajas no depende en exceso de la función de evaluación. más permisible. soluciones más cercanas a la raíz. Desventajas excesiva complejidad espacial, pues se deben guardar todos los nodos abiertos. en caso de que el sistema sea irrevocable, este método no actúa con eficacia la función de evaluación se complica Algoritmo asociado Inicio 1. LE := ((O,Estado_Inicial)); LV:=(); Test de Parada 2. Si ( LE = () ) entonces Escribir(“no hay solución”), PARE; 3. (F,P):= Mejor(LE) 4. Si ( P es Meta ) entonces Determinar_Solucion, PARE; Genera Sucesores: 5. Adiciona_ultimo((F,P), LV); 6. Elimina_mejor(LE); 7. Para (Nodo (Hijos(P) - LV)) Adicionar_primero((P,Nodo), LE); 8. Ir a 2 Función BUSQUEDA-HAZ- LOCAL(problema, K) returns una lista de estados Entrada: problema, un problema K ,tamaño haz static:siguiente,sucesor,población,lista de nodos begin población <-HACER-LISTA- NODOS(ESTADOS-INICIALES- ALEATORIOS(problemas,K)) siguiente <-0 for cach nodo E población do sucesores <-HACER-LISTA- NODOS(EXPANDIR(nodos)) end población <- K mejores elementos siguientes endwhile return(poblacion) Este algoritmo es similar al algoritmo “primero el mejor” con la única diferencia que la función evaluadora es definido como sigue: Donde: g(e) es la menor distancia (costo) desde el “estado inicial” hasta “e” h(e) es una sobre-estimación de la menor distancia (costo) de “e” al estado meta tal que h(estado meta)=0. f (e) g(e) h(e)
- 6. end Búsqueda con Adversario Metodo Minimax Metodo de Poda Definición Minimax es un método de decisión para minimizar la pérdida máxima esperada en juegos con adversario y con información perfecta. Se aplica en técnicas con adversos y se usa para reducir el coste computacional de MINIMAX podando las ramas que nos llevan a una solución peor que las ya encontradas. Características Minimax es un algoritmo recursivo. El funcionamiento de Minimax puede resumirse como elegir mejor movimiento para ti mismo suponiendo que tu contrincante escogerá el peor para ti. Puede suspenderse la exploración por debajo de un nodo en cualquiera de los casos siguientes: A. Por debajo de cualquier nodo min que tenga valores beta menores o iguales a los valores de cualquier nodo max ascendiente suyo. B. Por debajo de un nodo max que tenga un valor alfa mayor o igual al valor beta de cualquier nodo min ascendiente. Aplicación -Generación del árbol de juego. Se generarán todos los nodos hasta llegar a un estado terminal. -Cálculo de los valores de la función de evaluación para cada nodo terminal. -Calcular el valor de los nodos superiores a partir del valor de los inferiores. -Desde los nodos de nivel n, buscar la mejor situación para mi y la peor para mi rival. Elegir la jugada valorando los valores que han llegado al nivel superior, es decir, obtengo la mejor rama. Es una técnica muy utilizada en programas de juegos entre adversarios como el ajedrez. Se aplica en espacios de estados demasiados grandes como para analizar todos los nodos
- 7. Ventajas El algoritmo tiene la capacidad de aprender de acuerdo a una base de datos histórica de movimientos realizados, es decir, aprende con la experiencia. Aprende del oponente y al tiempo le da ventaja. La eficacia de la poda alfa-beta depende del orden en el que se examinan los sucesoras. La poda no afecta el resultado final Desventajas Algoritmo de complejidad elevada a la hora de implementar. Solo funciona para enfrentar un oponente a la vez Es posible que no encuentre una solución aunque exista Algoritmo asociado El algoritmo explora los nodos del árbol asignándoles un valor númerico mediante una función de evaluación, empezando por los nodos terminalesy subiendo hacia la raíz. La función de evaluación definirá lo buena que es la posición de un jugador cuando lo alcanza. Función alfa-beta (nodo//en nuestro caso el tablero, profundidad, a,β, jugador) Si nodo es un nodo terminal o profundidad=0 Devolver el valor heurístico del nodo Si jugador 1 para cada hijo de nodo a:= max(a, alfa-beta(hijo, profundidad-1, a, β≤a romper (*poda β*) devolver a si no para cada hijo de nodo β:= min(β, alfa-beta (hijo, profundidad-1,a,β, jugador 1)) siβ≤a