
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (18)
Destacado
Destacado (20)
Último
Último (20)
Practica n4
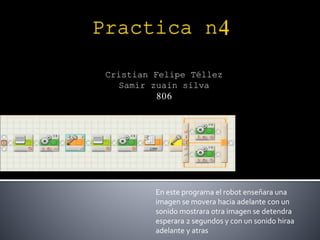
- 1. Cristian Felipe Téllez Samir zuain silva 806 En este programa el robot enseñara una imagen se movera hacia adelante con un sonido mostrara otra imagen se detendra esperara 2 segundos y con un sonido hiraa adelante y atras
- 2. En este otro se moverá adelante detectara la proximidad de un objetó y se detendrá antes de llegar a el esperara un segundo después con esa proximidad avanzara o retrocederá dependiendo de la situación