
Recomendados
Más contenido relacionado
Similar a Método de sustracción y operación
Similar a Método de sustracción y operación (20)
Último
Último (18)
Método de sustracción y operación
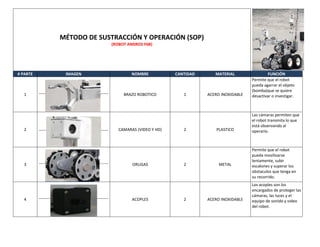
- 1. MÉTODO DE SUSTRACCIÓN Y OPERACIÓN (SOP) (ROBOT ANDROS F6B) # PARTE IMAGEN NOMBRE CANTIDAD MATERIAL FUNCIÓN 1 BRAZO ROBOTICO 1 ACERO INOXIDABLE Permite que el robot pueda agarrar el objeto (bomba)que se quiere desactivar o investigar. 2 CAMARAS (VIDEO Y HD) 2 PLASTICO Las cámaras permiten que el robot transmita lo que está observando al operario. 3 ORUGAS 2 METAL Permite que el robot pueda movilizarse lentamente, subir escalones y superar los obstaculos que tenga en su recorrido. 4 ACOPLES 2 ACERO INOXIDABLE Los acoples son los encargados de proteger las cámaras, las luces y el equipo de sonido y video del robot.
- 2. 5 DISRUPTOR 2 ACERO INOXIDABLE Permite destruir el objeto sospechoso a distancia sin que el operador corra riesgo. 6 RUEDAS NEUMATICAS 4 PLASTICO Se utilizan cuando se requiere movilizar al robot rápidamente. 7 LUCES 2 PLASTICO Permite al robot y al operario realizar sus funciones correctamente. En los momentos que necesite iluminacion 8 Joystick de control 1 PLASTICO y elementos electricos Se utilizan para manorear al robot, En conclusion darle las ordenes mediante el control 9 Sistema de vision 1 PLASTICO y elementos electricos permite al encargado de manejar el robot en ver en tiempo real lo que observan las camaras del robot
- 3. MÉTODO DE SUSTRACCIÓN Y OPERACIÓN (SOP) (ROBOT ANDROS F6B) # PARTE IMAGEN NOMBRE CANTIDAD MATERIAL FUNCIÓN 1 Esamblaje electrico 1 Arduino, tarjeta madre, circuitos integrados, transistor, diodos, resistencias Se encarga de conectar todos los dispositivos para que funcione el sistema operativo. Para abreviar un poco digamos que recibe la electricidad desde la fuente de alimentación y la distribuye a todos los componentes conectados en ella. 2 batería de gel-célula de 24VDC 35 amp-hr 1 celdas electroquímicas que pueden convertir la energía química almacenada en electricidad. Es la fuente de alimentacion, proporciona enerfia electrica al robot, para su correcto funcionamiento
- 4. 3 Motor 1 elementos eloctronicos y partes de alumino o acero que trabajan en conjunto para generar fuerza, moviento. Permite que el robot se pueda mover mediante las llandas, ademas de tener incorparado el sistema de orugas 4 Caja de control 1 Arduino, tarjeta madre, circuitos integrados, transistor, diodos, resistencias recibe la informacion suministrada del control remoto, y la envia al robot para que realice las opciones ordenadas, todo esto en tiempo real 7 principios del diseño universal 1. uso equiparable no lo cumple ya que la persona que utilice este robot debe cumplir con ciertas capacidades físicas y de conocimiento 2. Uso flexible si la cumple porque ofrece al usuario exactitud y precisión 3. Simple e intuitivo si la cumple su diseño es fácil de entender ya que este robot funciona casi similar a un juguete a control remoto 4. Información perceptible si la cumple porque proporciona información visual en tiempo real. 5. Tolerancia al error no la cumple, depende del usuario ya que es un robot controlado. 6. Que exija poco esfuerzo físico si la cumple porque el especialista en bombas no estará en peligro 7. Tamaño y espacio para el acceso y el uso, si la cumple