Descargar como PPS, PPTX








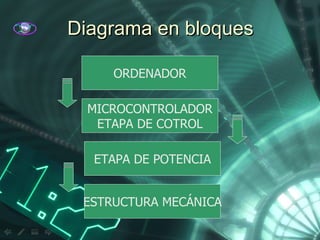





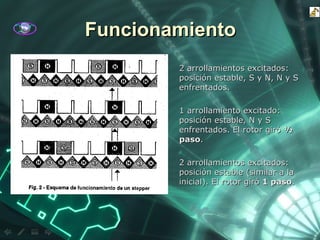

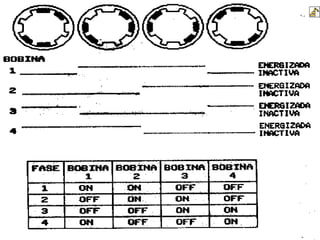


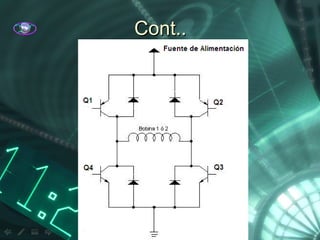












Este documento describe el desarrollo de un brazo mecatrónico controlado por microcontrolador. Explica los componentes clave del brazo como motores paso a paso, estructura mecánica y circuitos de potencia y control. También define qué es un robot industrial según varias asociaciones y describe las etapas de construcción del prototipo del brazo mecatrónico.






















































































