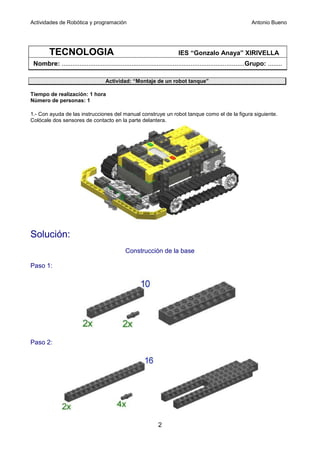
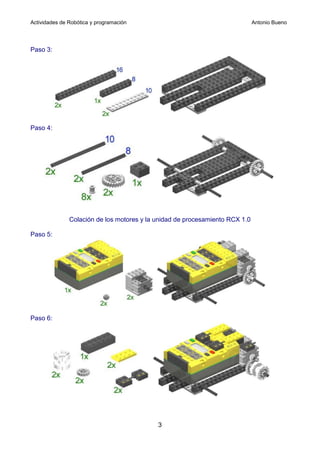
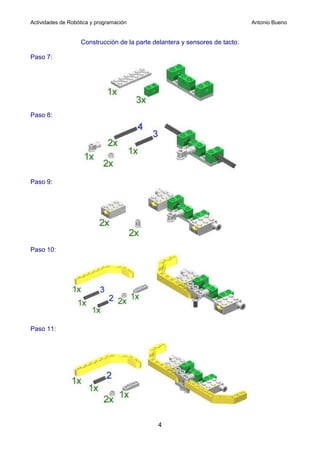
El documento describe tres actividades de robótica y programación para alumnos de 4o de la ESO usando LEGO. La primera actividad implica construir un robot tanque. La segunda implica programar el robot tanque para que se mueva sobre una mesa usando sensores de luz sin caerse. La tercera actividad implica planear y programar un escenario donde el robot tanque siga una línea negra esquivando obstáculos.