Este documento describe los autómatas push-down. Estos son máquinas con un número finito de estados, una cinta de entrada y una pila. Dependiendo del estado, el símbolo en la cinta de entrada y el tope de la pila, el autómata puede cambiar de estado, empujar o sacar símbolos de la pila y avanzar en la cinta de entrada. Los autómatas push-down pueden reconocer lenguajes libres de contexto, los cuales incluyen a los lenguajes regulares.




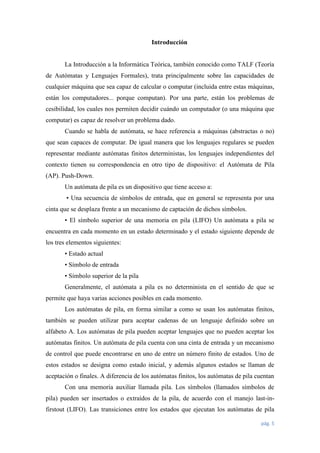



![La figura anterior muestra el avance de un símbolo de entrada (q1, c, B), a un
estado posterior y sustitución de la cima de la pila {(q2, B)}.
El segundo tipo de movimiento conocido como movimiento ε es parecido al
primero, excepto que el símbolo de entrada no se utiliza y la cabeza de la entrada no
avanza después del movimiento. Este tipo de movimiento permite al PDA manipular la
pila sin leer símbolos de entrada como se muestra en la figura: Manipulación de la pila
sin leer símbolo de entrada.
Un autómata de pila es un autómata finito más una pila. Se definen por la a tupla
M = (Q; P ; ¡; ±; q0; Z0; F) donde Q; P,S , q0 y F se definen igual que en un AFN. G es
un alfabeto de los caracteres que pueden introducirse a la pila, y Z0 es el símbolo inicial
en la misma, generalmente l (significa pila vacía), pero en ocasiones es útil usar otro
símbolo.
La función de transición es definida como:
: Q x (S È {l } ) x (G È {l } ) ® [Q x (G È {l })]*
Es decir que el cambio de estado ya no sólo depende del estado y del símbolo en
la entrada, sino además del contenido de la pila, específicamente del símbolo en el tope
de la pila. El contenido de la pila puede cambiar después de cada transición.
Para clarificar a la función de transición, analicemos la parte por parte:
Q x (S È {l } ) x (G È {l } ): Esta nos dice que los elementos del dominio son
tercias (estado, alfabeto, pila)
[Q x (G È {l })]*: Indica que el codominio son varios pares del tipo (estado,
pila).
pág. 9](https://image.slidesharecdn.com/articuloautomatapush-down-140223232307-phpapp02/85/Articulo-Automata-push-down-9-320.jpg)



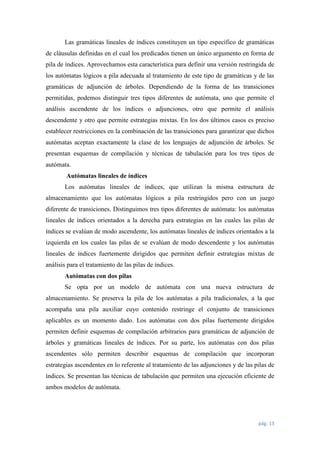
![El funcionamiento típico de un autómata Push-down.
Por ejemplo, el siguiente autómata de pila reconoce L(G) = {wcwR|w E (0+1)*}
, es decir los palíndromes en (0 + 1)* cuyo punto intermedio está marcado con un
carácter especial c:
M = ({q1,q2}, {0,1}, {RBG}, d , q1, R, q )
Donde d vale:
Descripción
[q, w, a ] ^ [qj,v,b ] ^ * ^ + Se pueden usar descripciones instantáneas para ver el
funcionamiento del autómata: (q, aw, za ) ^ (p,w,b a ) si d (q,a,z) = (p,b ).
La cadena de un lenguaje es aceptado por el autómata si éste para en elestado
final: L(M) = {w|(q0,w,Z0) ^ (p,e ,g ) para algún p Î F, g Î G *}
Autómata Push-down para el reconocimiento de lenguajes libres de
contexto.
Toda gramática GLC puede ponerse en forma normal de Greibach, en donde
todas las producciones son del tipo
L ->aa donde a Î (V U T)*, a Î (T U {e }).
Método de normalización:
Suponer V = { L 1 ... L m}.
Hacer todas las producciones del estilo
L i -> L jg para j >i.
Si j < i, sustituir L j por sus lados derechos. Si j = i, eliminar recursión a la
izquierda, sustituyendo: L i -> L a 1 | L a 2 | ... | L ia 1 || b 1 | .... |b n | por:
L i -> b 1 | .... |b s | b 1B| .... |b s Bi
Bi -> a 1 |a 2| .... |a T | a 1Bi| a 2Bi| .... |a T Bi
Sustituir L m -> g en L m-1, después en L m-2 y así sucesivamente.
En las nuevas producciones Bi, si es necesario sustituir el primer símbolo no
terminal por lo que produce.
Por ejemplo en:
G = ({L 1; L 2; L 3 },{a,b},P, L 1)
P : L 1 -> L 2L 3
pág. 14](https://image.slidesharecdn.com/articuloautomatapush-down-140223232307-phpapp02/85/Articulo-Automata-push-down-14-320.jpg)
![L 2 -> L 3L 1 | b
L 3 -> L 1L 2 | a
Hay que cambiar la última producción en
L 3 -> L 1L 2 | a
L 3 -> L 2L 3L 2 | a
L 3 -> L 3L 1L 3L 2 | bL 3L 2 |a
y después de eliminar la recursión a la izquierda tenemos
L 3 ->bL 3L 2B3 | aB3 | bL 3L 2 | a
B3 -> L 1L 3L 2 | L 1L 3L 2B3
Finalmente sólo nos resta sustituir en toda producción, a partir de L 3, los
símbolos no terminales de la izquierda.
Obtención de una GLC a partir de un Autómata de Pila (push-down).
Para obtener la GLC G = (V, T, P, S) correspondiente a un APN M, hay que
crear primero un APN extendido M´ con d ´ construida a partir de d a la que se le añade:
1. Si [ qj, e ] Î d ( qi, u, e ) entonces [ qj, L ] Î d ´ (qi, u, L ) para toda L Î G .
2. Si [ qj, B ] Î d ( qi, u, e ) entonces [ qj, BL ] Î d ´ (qi, u, L ) para toda L Î G .
El alfabeto de entrada de G es el alfabeto de entrada de M´. Las variables de G
consisten de un símbolo inicial S y objetos de la forma <qi, L ,qj> donde las q’s son los
estados de M´ y L Î G È {e }. La variable <qi, L ,qj> representa un cálculo que
comienza en el estado qi , termina en qj y quita el símbolo L de la pila. Las reglas de G
son construidas de la siguiente manera:
S Þ < q0, e ,qj> para cada qj Î F.
Cada transición [ qj, B ] Î d ( qi, x, L ), donde L Î G È {e } genera el conjunto de
reglas
{<qi, L , qk>Þ x <qj, B, qk> | qk Î Q }
3. Cada transición [ qj, BL ] Î d ( qi, x, L ), donde L Î G È {e } genera el
conjunto de reglas
{<qi, L , qk>Þ x <qj, B, qn><qn, L , qk> | qk , qn Î Q }
Para cada estado qk Î Q ,<qk , e , qk> Þ e
Obtención de una gramática de contexto libre a partir de un Autómata
Push-down sin estados finales.
Si en lugar de tener un Autómata Push-down con estados finales como en el caso
anterior tenemos un autómata Push-down que termina cuando se vacía la pila, podemos
aplicar el procedimiento explicado a continuación. Si M = (Q, S , G , d , q0, Z0, q ) es
pág. 15](https://image.slidesharecdn.com/articuloautomatapush-down-140223232307-phpapp02/85/Articulo-Automata-push-down-15-320.jpg)
![una autómata Push-down, puede ser representado por la gramática libre de contexto G =
(V, S , P, S), donde V = {< q, L , p > | q, p Î Q ^ L Î G } È {S} y P tiene las siguientes
producciones:
S Þ [q0, Z0, q] para cada q en Q.
[q, L , qm+1] Þ a[q1,B1,q2][q2,B2,q3] ... [qm,Bm,qm+1] para cada q,q1,q2, ...,
qm+1
en Q, cada a en S È {e } y L , B1, B2, ... Bm en G tal que d (q,a,L )contiene a
(q1, B1B2 ... Bm).
Aplicación de un Autómata Push-down
El autómata para procesar un lenguaje del tipo 2 o Lenguaje de contexto libre es
llamado
Autómata Finito Push-down (PDFA). El elemento push-down permite que este
tipo de autómata puede procesar las sentencias más complejas que puedan resultar de un
lenguaje de contexto libre. En otras palabras, una de las diferencias fundamentales entre
un lenguaje del tipo 3 y uno del tipo 2 es la necesidad de "recordar" cuándo fue la
ocurrencia de un símbolo y cuándo se generó una comparación de símbolo.
Este es el caso del lenguaje de paréntesis, en el que es necesario recordar el
número de paréntesis izquierdo en orden para reconocer el número de paréntesis
derecho correcto. El Autómata Pushdown mantiene un stack que es usado como
memoria para este propósito. En el autómata finito de estados, las transiciones entre
estados se basan sólo en el estado actual y en el carácter de la cadena de entrada. EN el
caso de los autómatas Pushdown la transición es una función del estado actual, el
carácter actual en la cadena de entrada y el carácter actual en la CIMA del stack del
autómata Push-down.
En el lenguaje de paréntesis, es necesario no perder de vista cada paréntesis
izquierdo que es encontrado, además de cuándo se ha encontrado un paréntesis derecho
después en la sentencia. Esto puede hacerse poniendo una marca en el stack del
Autómata Push-down cada vez que se encuentra un paréntesis izquierdo. Cuando se
encuentra un paréntesis derecho en la sentencia de entrada, se hace una transición de
estado se hace solo si el stack tiene la marca correspondiente; y en caso contrario,
entonces la sentencia no es parte del lenguaje de paréntesis.
Si el último estado del autómata push-down no es un estado de aceptación
entonces la sentencia no es parte del lenguaje.
pág. 16](https://image.slidesharecdn.com/articuloautomatapush-down-140223232307-phpapp02/85/Articulo-Automata-push-down-16-320.jpg)


![inconsistentes puede ocurrir solamente si M tiene una instrucción de escritura: q] write
(u, q') para la cual el estado sucesor q' es el rótulo de una instrucción read.
En el programa de un APD M, una instrucción write: q] write (u, q') es impropia
si q' es el rótulo de una instrucción read cualquiera. Una APD es propio si su programa
no contiene instrucciones impropias. Las instrucciones impropias son fácilmente
identificables en el diagrama de estados de un APD, y pueden ser eliminadas sin
modificar el comportamiento de la máquina en lo referente al lenguaje reconocido. En
particular, si M es un APD cualquiera, es posible construir un APDP mediante la
adición y el borrado de instrucciones tal como sigue.
Obsérvese que no hay transiciones para todas las ternas posibles de estado,
símbolo de entrada y símbolo de pila. Por lo tanto, si el PDA pasa a un estado para el
cual no se especifica un estado siguiente y una acción de la pila para los símbolos
actuales de la pila y la entrada, el PDA no puede volver a realizar ningún movimiento.
En particular, cuando el autómata está en el estado q4, que es el estado de
aceptación, no hay ninguna transición sea cual sea el símbolo de la cima y de la entrada.
Si el PDA se mueve al estado q2, entonces obsérvese que cada vez que aparece en la
entrada se apila una B en la pila.
El PDA permanece en el estado q2 hasta que se encuentra la primera b entonces
se mueve al estado q3, ninguna b puede preceder a una a.
pág. 19](https://image.slidesharecdn.com/articuloautomatapush-down-140223232307-phpapp02/85/Articulo-Automata-push-down-19-320.jpg)

















































![Automatas[1]](https://cdn.slidesharecdn.com/ss_thumbnails/automatas1-091115165119-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















